STE 58762
- -
1-1
CHAPTER 1
AN OUTLINE OF ROBOT LANGUAGE
This chapter describes the connection between robot language and robot movement, and presents
a rough outline of commands used in robot language.
1.1 ROBOT MOVEMENT
Robots do work in place of people. For example, let’s say that somebody has to attach a part to a
workpiece coming down a conveyor. The employee takes a part from a parts bin and attaches the
part to a workpiece transported to his or her station by a conveyor. If we were to set up a robot to
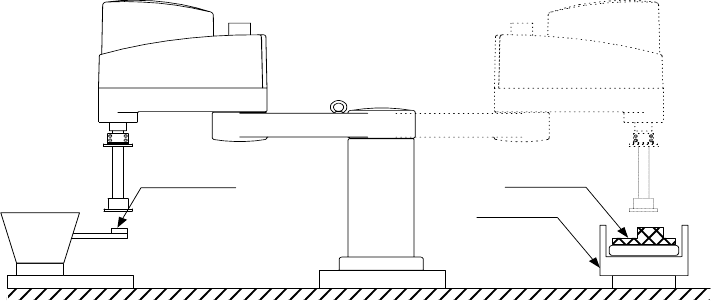
do this work instead, we would have an arrangement something like that shown in Figure 1.1.
Fig. 1.1 Assembly work
Here, the robot grabs a part from the parts feeder and attaches the part to a workpiece coming
down the conveyor. considering this work from the point of view of the robot (and not, for example,
from the point of view of the parts feeder or conveyor), we would come up with a diagram like that of
Figure 1.2. In this Figure, the robot first moves straight down from Point B to Point A, where it
grabs a part. After grabbing the part, the robot moves back up from Point A to Point B. From
Point B, the robot moves the part to Point C, which is directly above the part attachment location
Point D. The robot then drops down from Point C to Point D, and attaches the part to the
workpiece. When the robot is finished attaching the part, it moves back up to Point C, and then
finally back to Point B. This completes one work cycle.
Conveyor
Wokpiece
Parts feeder












































