www.controltechniques.com
13
Selecting the Right Motor for the Right Drive
Example (using Control Techniques’ NT Motor family and Unidrive SP Servo drive family):
Control Techniques drive-and-motor combinations provide
an optimized system in terms of ratings, performance, cost
and ease of use. Use Control Techniques’ FREE CTSelect
software to select system components or manually select
the system using the following steps.
1. Determine the application’s continuous and peak torque
requirements at various motor shaft speeds, then refer to
motor data tables and the visual-reference overview on
the facing page to help determine which motor family will
be most appropriate for the application.
2. Once the motor family is selected, refer to the Control
Techniques Servo Motors brochure to select a specic
motor that delivers the required torque and speed.
Make note of the continuous and peak current (Amps)
requirements of the selected motor.
3. Check the ratings tables on page 19 of this brochure to
select the drive model that delivers adequate continuous
and peak current for the selected motor.
4. Go to the Control Techniques Servo Motors brochure to
select motor power and feedback cables for the selected
drive/motor combination.
Check that the rotor inertia of the selected motor has a
ratio of <10 when calculated with the load inertia using
the following equation:
Load inertia / rotor inertia
Note: A gear reducer will reduce the load inertia based on
the following equation:
Reflected load inertia = load inertia / (gear ratio)
2
When specifying a motor system, be sure to consider such
factors as user-interface (HMI) options, braking resistors and
other options and accessories that will enhance the system’s
performance and value (see Options & Accessories brochure
for information and order codes).
Electronic Nameplates
Some motors tted with high-resolution SinCos or absolute
encoders are pre-loaded with the motor “electronic
nameplate” data during the manufacturing process. This
data can be read by Control Techniques’ Servo drives and
used to automatically optimize the drive settings. This
feature simplies commissioning and maintenance, ensures
consistent performance and saves time.
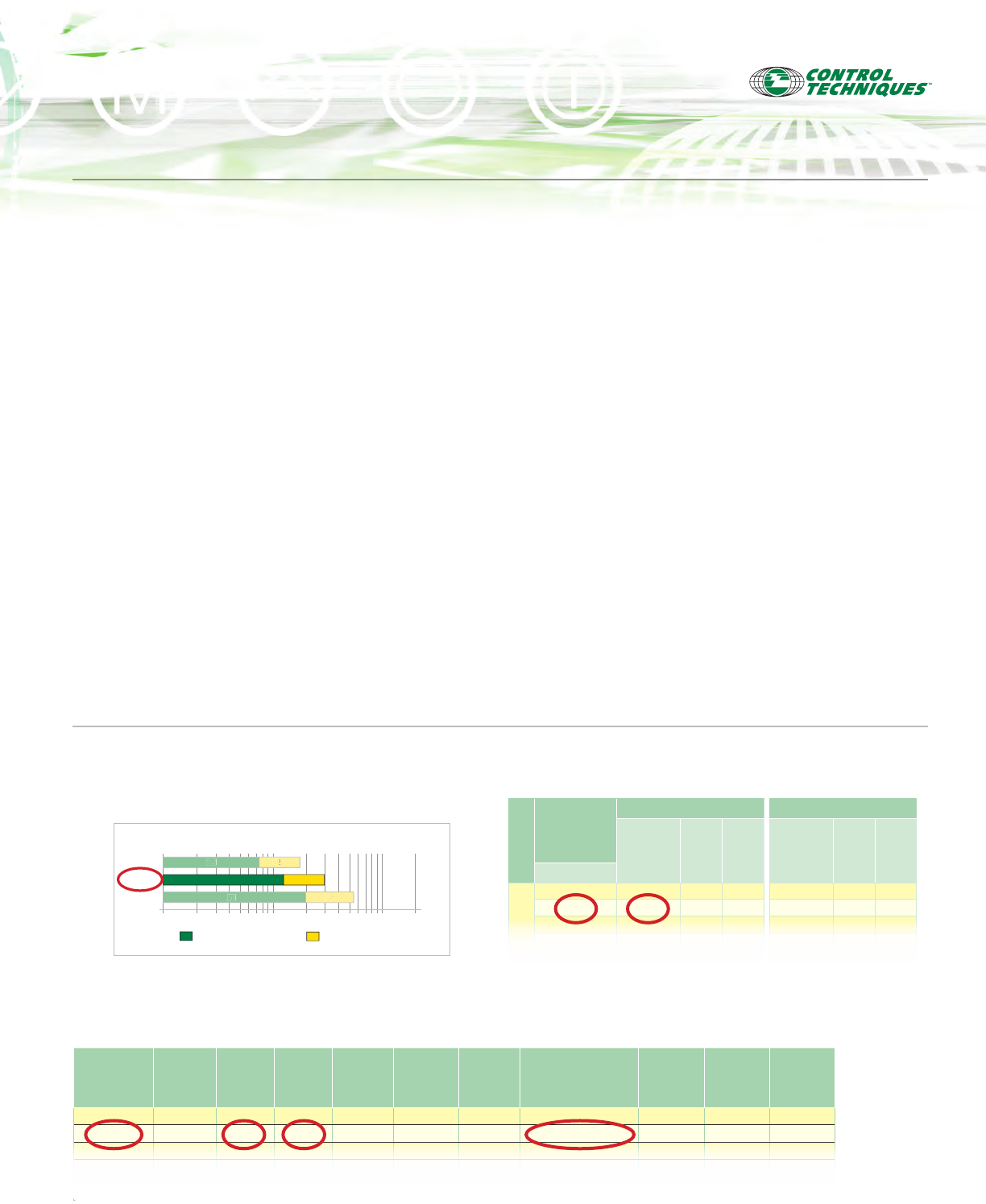
Step 1: The application requires 10 lb-in continuous torque.
The input voltage available is 230Vac.
Continuous Stall (lb-in) Peak (lb-in)
Frame
Size
NT Torque Range
NT-207
NT-212
NT-320
12.5 37.5
110 100
20 56
7.5 18
Step 2: The Control Techniques Servo Motors brochure lists
the NT-212 motor with 2.7A continuous torque and 6A peak.
NT Motor Specifications
Motor Model
Rated
Torque
lb-in (Nm)
Cont.
Stall
Current
Arms
Peak
Current
Arms
Motor
Resistance
Ohms
Motor
Inductance
mH
Max
Operating
Speed
rpm
Inertia
lb-in-sec
2
(kgm
2
)
Motor Ke
Vrms/krpm
Motor Kt
lb-in/Arms
(Nm/Arms)
Motor
Weight
lb (kg)
NT-207 7.5 (.85) 1.7 3.6 11.1 39.1 5000 0.000094 (.106) 35 5.12 (.58) 3 (1.36)
NT-212 12.5 (1.4) 2.7 6 4.56 18.9 5000 0.000164 (.000018) 35 5.12 (.58) 4 (1.82)
NT-320 20 (2.2) 5.4 16.2 1.5 16.0 4000 0.000328 (.37) 29 3.50 (.40) 6 (2.72)
NT-320
medium inertia
18.0 (2.0) 5.4 16.2 1.5 16.0 4000 0.000558 (.63) 29 3.50 (.40) 6.9 (3.13)
NT-320 32 (3.6) 6.25 18.38 1.2 15.0 4000 0.000438 (.494) 36 4.73 (.53) 7.3 (3.31)
Step 3: Select the Unidrive SP drive with adequate current rating.
For complete information on Control Techniques’ Servo motor offering, refer to brochure number BRO-SRVOMTRS-1107.
Frame Size
200-240Vac
+/- 10% 3Ø
(kW@220V,
hp@230V)
Normal Duty Heavy Duty
Max
Continuous
Current (A)
Motor
Power
(hp)
Typical
Output
(kW)
Max
Continuous
Current (A)
Motor
Power
(hp)
Typical
Output
(kW)
Order Code
0
SP0201 2.2 0.5 0.37 2.2 0.5 0.37
SP0202 3.1 0.75 0.55 3.1 0.75 0.55
SP0203 4 1 0.75 4 1 0.75
SP0204 5.7 1.5 1.1 5.7 1.5 1.1
SP0205 7.5 2 1.5 7.5 2 1.5
Step 4: Select the appropriate power and feedback cables.





















