



















BOOK 0958-B
20
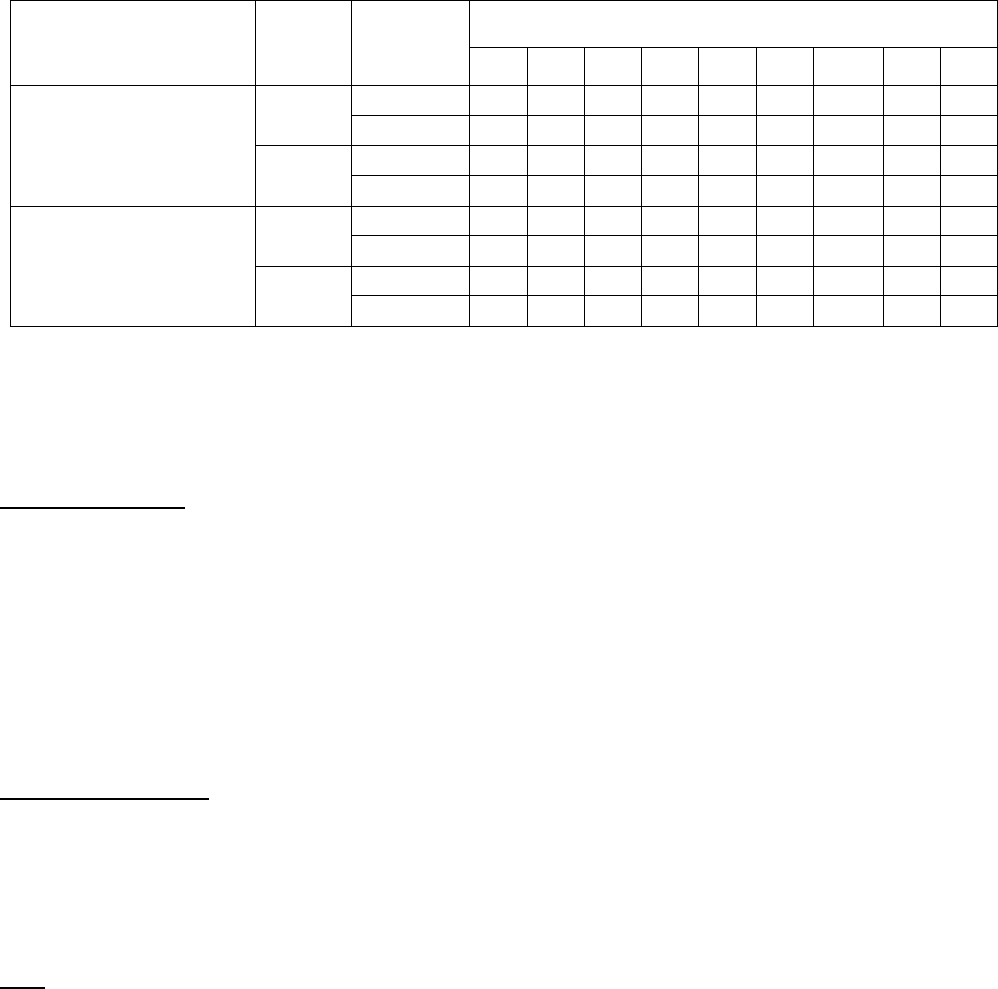
TABLE 5. DYNAMIC BRAKING CHARACTERISTICS
a
RATED
HORSEPOWER
COMPONENT MODEL
RATED
VOLTAGE
1/6 1/4 1/3 1/2 3/4 1 1-1/2 2 3
115V 180 129 103 66 44 34 NA NA NA
2331
2335
230V NA NA 400 278 190 130 88 62 NA
115V 300 215 170 110 75 60 NA NA NA
BRAKING TORQUE (%)
2332
2336
230V NA NA NA 400 320 220 145 105 85
115V 15 12 11 8 6 2 NA NA NA
2331
2335
230V NA NA 12 8 6 1 1 1 NA
115V 9 6 5 5 4 4 NA NA NA
STOPS PER MINUTE
2332
2336
230V NA NA NA 5 4 4 3 3 2
a. HIGH INERTIA LOADS MAY EXTEND BRAKING TIME AND CAUSE THE WATTAGE
RATING OF THE DYNAMIC BRAKING RESISTORS TO BE EXCEEDED.
An antiplug feature is included with optional Armature Contactor Reversing With Dynamic Braking (Option 1004).
This feature prevents restarting the motor before the motor has braked to a stop.
SPEED CONTROL
Motor speed is directly proportional to the setting of the MOTOR SPEED potentiometer or the magnitude of an
external speed reference signal, as applicable. This potentiometer or the speed reference signal may be adjusted while
the motor is running or may be preset before the motor is started.
The rates of acceleration and deceleration are preset by the ACCEL and DECEL potentiometers, respectively,
located on the controller control board.
Maximum speed and minimum speed are preset by the MAX SPD and MIN SPD potentiometers, respectively,
located on the control board.
TORQUE CONTROL
Motor torque is directly proportional to the setting of the CURRENT LIMIT potentiometer or the magnitude of an
external torque reference signal, as selected by dip switch SW3, position 3. This potentiometer or the current reference
signal may be adjusted while the motor is running or may be preset before the motor is started. Note that if the process
demands less torque then the torque reference is commanding, motor speed will continue to increase up to maximum
speed.
JOG
If a RUN-STOP-JOG switch is used, place the switch in JOG position. Otherwise initiate a Jog command. Jog is
momentary, causing motor rotation only while the switch is held in JOG position or while a Jog command is active.
Release the switch to stop the motor.
Normally, jog speed is directly proportional to the setting of the MOTOR SPEED potentiometer. If a separate JOG
SPEED potentiometer is used, jog speed will be directly proportional to the setting of the JOG SPEED potentiometer.