



















11-7
Chapter 11 FXYBX/SXYBX
3 Installing the Tool
Install the user tool onto the robot's tool installation surface in the following manner.
WARNING
Always turn the controller power OFF before Installing a tool to prerent
an accident.
WARNING
Before installing a tool, check that the robot is securely fixed to the base.
WARNING
The user is responsible for determining the required bolt type and tight-
ening torque, and accurately installing the tool. Improper installation can
cause the tool to dislocate during operation and lead to serious accidents.
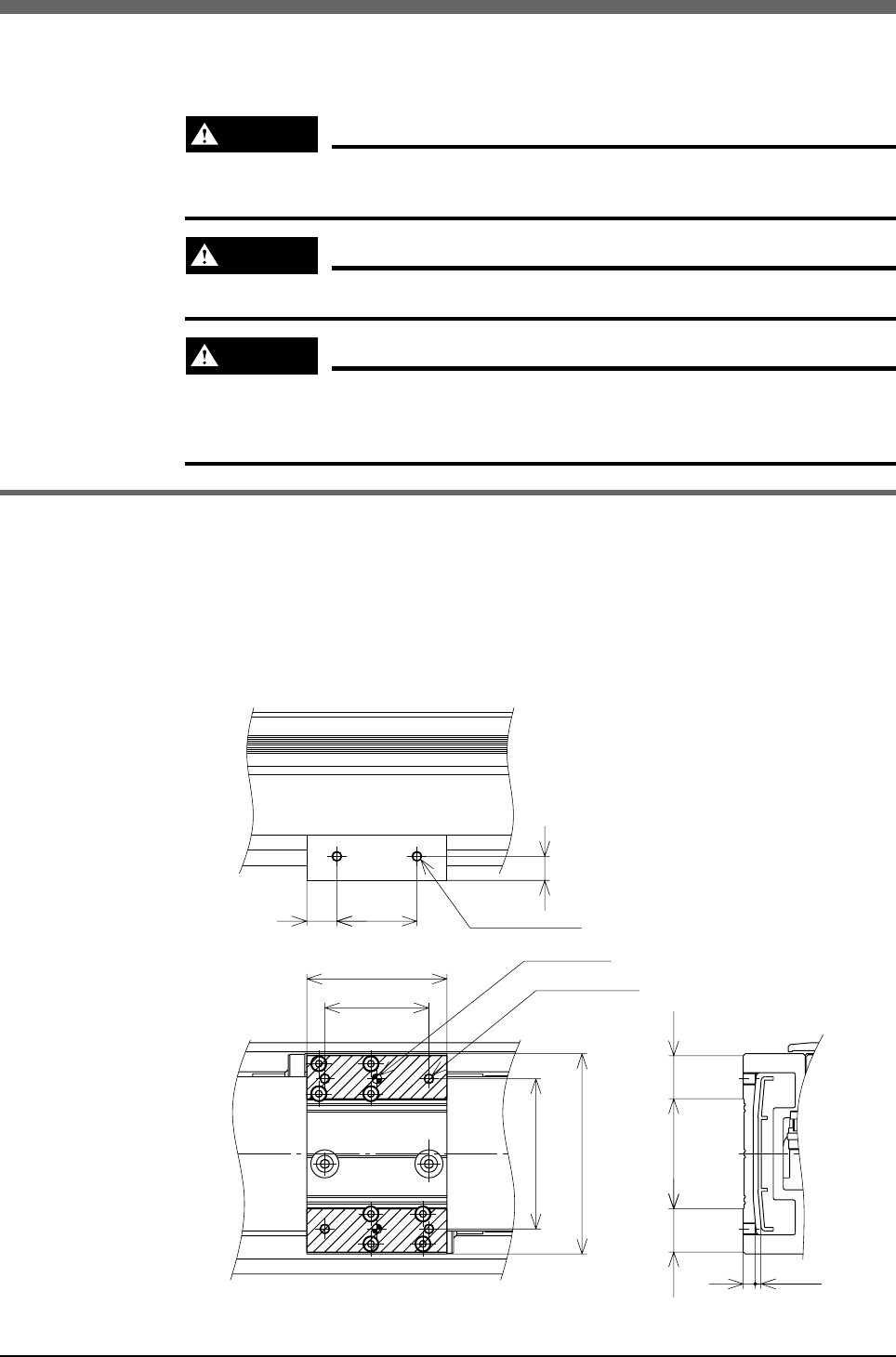
3-1 FXYBX arm type 2-axis model
Four M5 coarse thread tap holes and two φ5 reamer holes are opened on the Y-
axis slider. (Refer to Fig. 11-9.) Install the user tool onto the Y-axis slider using
these holes.
Four M5 coarse thread tap holes are also opened on the slider side. Use these as
required.
Fig. 11-9 FXYBX arm type
(Tolerance between knock (0.02)
52
70
75
2-φ5H7 Depth4
4-M5×0.8 Depth6
100
6
2.8
12
40
4-M5ζ0.8 Depth9.5
15
55 21.521.5