



















4 - 13
MDS-D-SVJ3/SPJ3 Series Specifications Manual
4-1 Servomotor
4-1-9 Dynamic brake characteristics
If a servo alarm that cannot control the motor occurs, the dynamic brakes will function to stop the servomotor
regardless of the parameter settings.
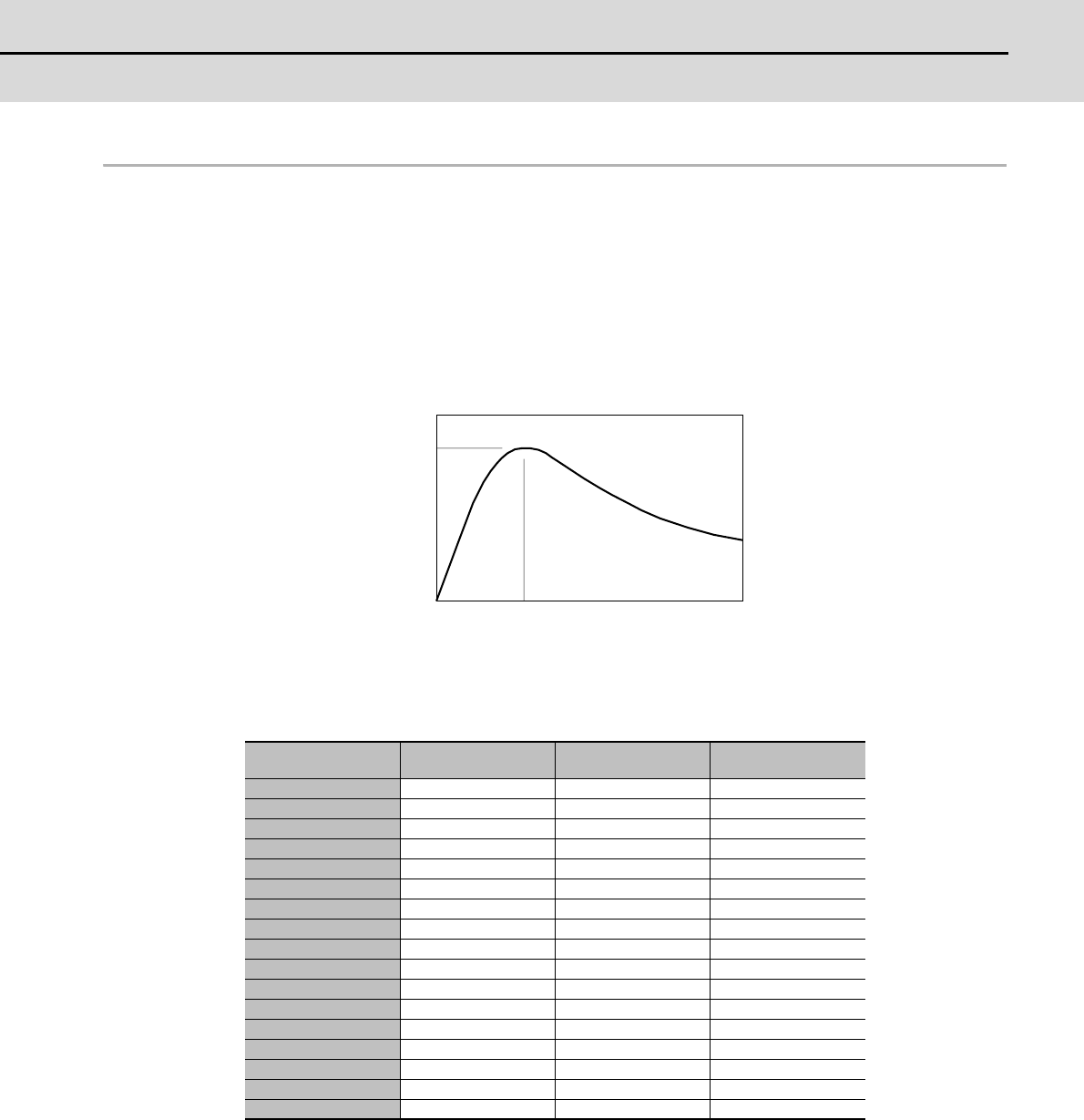
(1) Deceleration torque
The dynamic brake uses the motor as a generator, and obtains the deceleration torque by consuming that
energy with the dynamic brake resistance. The characteristics of this deceleration torque have a maximum
deceleration torque (Tdp) regarding the motor speed as shown in the following drawing. The torque for each
motor is shown in the following table.
Max. deceleration torque of a dynamic brake
Motor type
Stall torque
(N•m)
Tdp
(N•m)
Ndp
(r/min)
HF75 2.0 2.71 4120
HF105 3.0 5.10 5544
HF54 2.9 1.98 1886
HF104 5.9 10.02 735
HF154 9.0 15.65 850
HF224 12.0 20.06 1042
HF204 13.7 15.97 617
HF354 22.5 35.28 908
HF123 7.0 9.79 561
HF223 12.0 19.95 686
HF303 22.5 30.43 550
HF142 11.0 14.43 427
HF302 20.0 29.42 396
HF-KP13 0.32 0.22 1522
HF-KP23 0.64 0.52 1062
HF-KP43 1.3 1.30 822
HF-KP73 2.4 1.48 3449
T
dp
N
dp
0
Motor speed
Deceleration
torque
Deceleration torque characteristics of a dynamic brake