



















FX Series Programmable Controllers STL Programming 3
3-11
3.7 Using STL To Select The Most
Appropriate Program
So far STL has been considered as a simple flow charting programming language. One of
STL’s exceptional features is the ability to create programs which can have several operating
modes. For example certain machines require a selection of ‘manual’ and ‘automatic’ modes,
other machines may need the ability to select the operation or manufacturing processes
required to produce products ‘A’, ‘B’, ‘C’, or ‘D’. STL achieves this by allowing multiple program
branches to originate from one STL state. Each branch is then programmed as an individual
operating mode, and because each operating mode should act individually, i.e. there should be
no other modes active; the selection of the program branch must be mutually exclusive. This
type of program construction is called “Selective Branch Programming”. An example
instruction program can be seen below, (this is the sub-program for STL state S20 only) notice
how each branch is SET by a different contact.
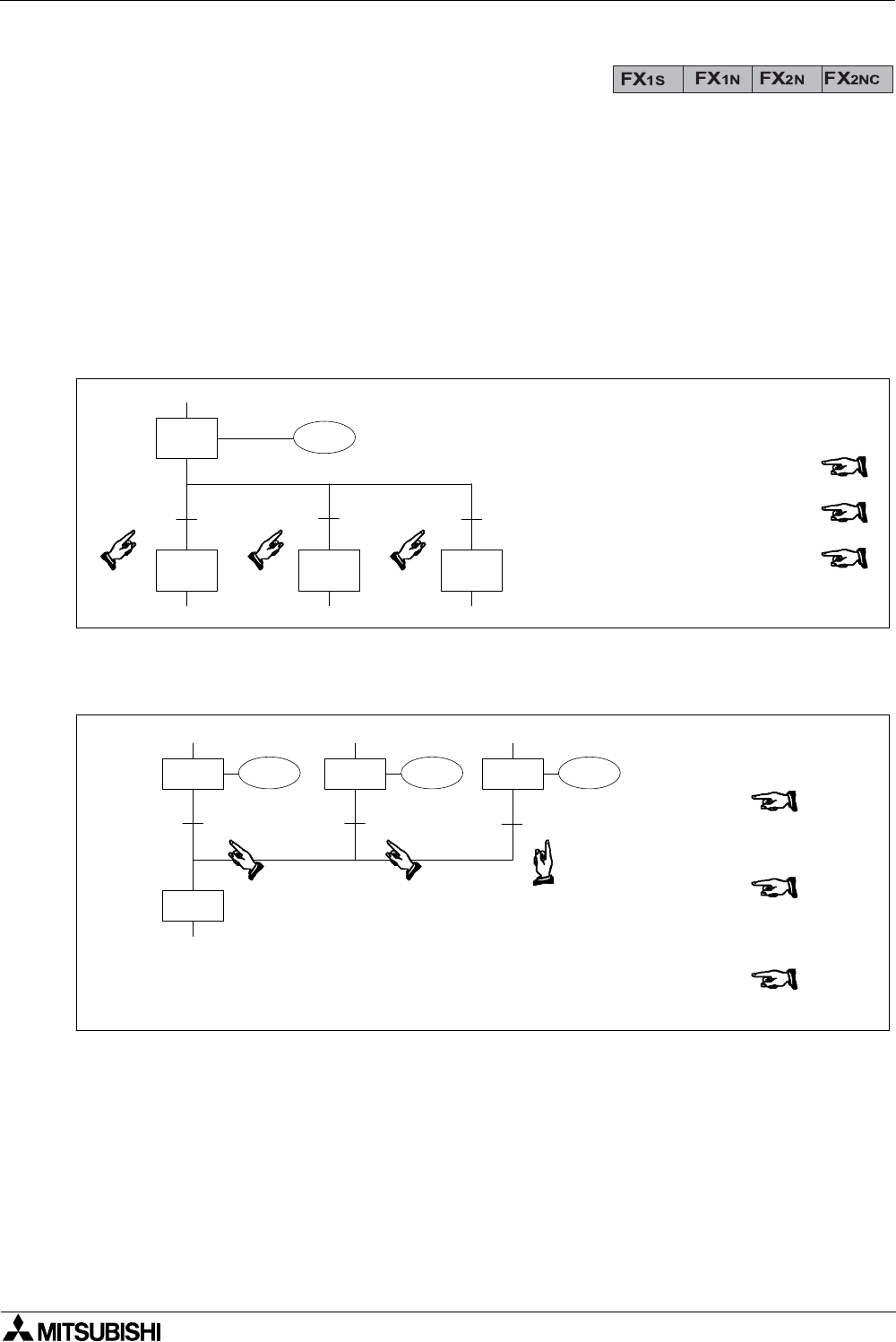
A programming construction to split the program flow between different branches is very useful
but it would be more useful if it could be used with a method to rejoin a set of individual
branches.
This type of STL program construction is called a “First State Merge” simply because the first
state (in the example S29, S39 or S49) to complete its operation will cause the merging state
(S50) to be activated. It should be noticed how each of the final STL states on the different
program branches call the same “joining” STL state.
Y0
X0
X1 X2
S
Y
X
S
X
S
X
S
20
0
21
1
31
2
41
STL
OUT
LD
SET
LD
SET
SET
LD
0
S 21 S 31 S 41
S 20
Y10
S 29
X10
S 39 S 49
X11 X12
Y11
Y12
S 50
STL
OUT
S
Y
39
11
STL
OUT
S
Y
49
12
LD
SET
X
S
10
50
LD
SET
X
S
11
50
LD
SET
X
S
12
50
STL
OUT
S
Y
29
10