



















FX Series Programmable Controllers STL Programming 3
3-18
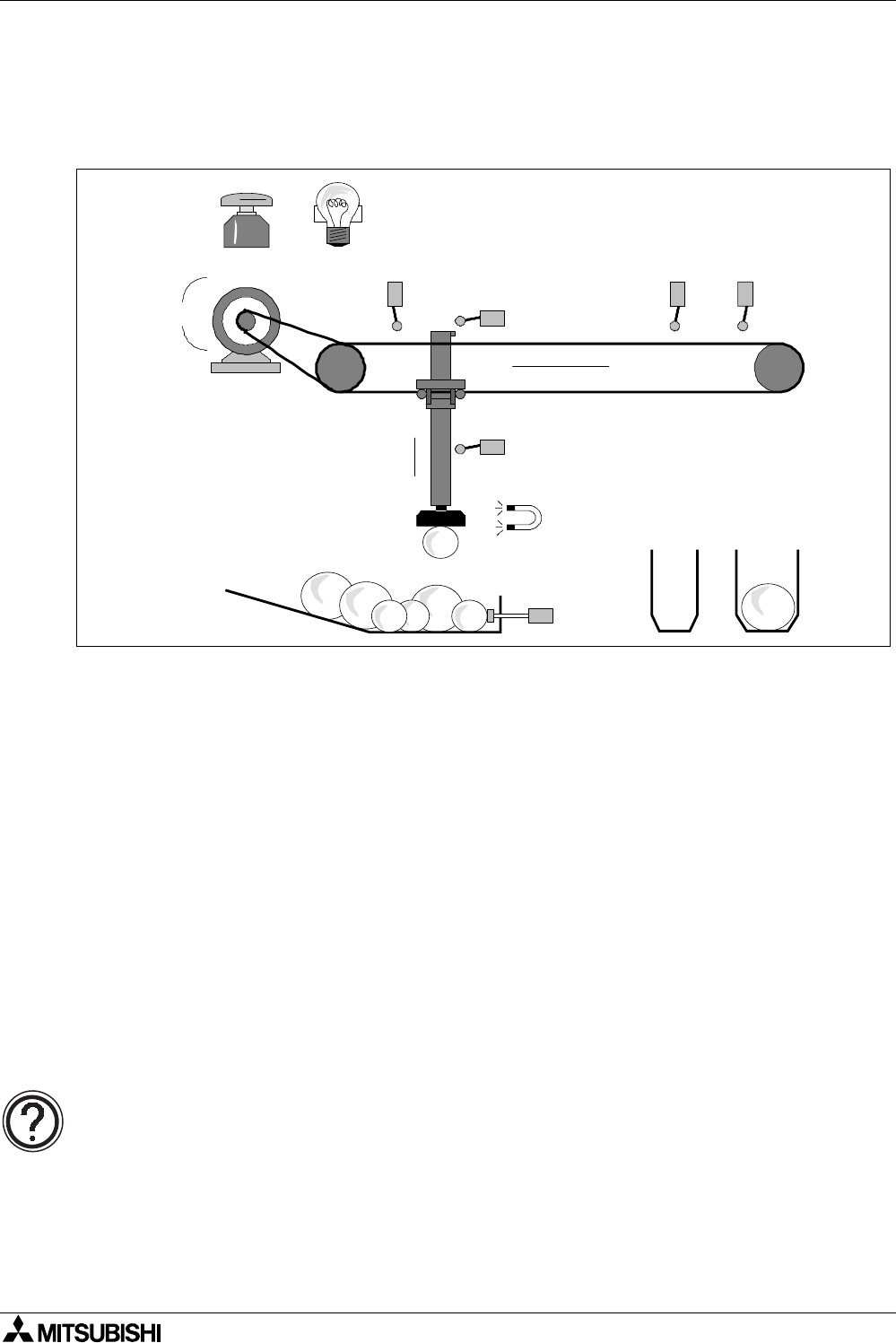
3.11.2 A Selective Branch/ First State Merge Example Program
The following example depicts an automatic sorting robot. The robot sorts two sizes of ball
bearings from a mixed ‘source pool’ into individual storage buckets containing only one type of
ball bearing.
The sequence of physical events (from initial power On) are:
1) The pickup arm is moved to its zero-point when the start button (X12) is pressed. When the
pickup arm reaches the zero-point the zero-point lamp (Y7) is lit.
2) The pickup arm is lowered (Y0) until a ball is collected (Y1). If the lower limit switch (X2) is
made a small ball bearing has been collected; consequently no lower limit switch signal
means a large ball bearing has been collected. Note, a proximity switch (X0) within the
‘source pool’ identifies the availability of ball bearings.
3) Depending on the collected ball, the pickup arm retracts (output Y2 is operated until X3 is
received) and moves to the right (Y3) where it will stop at the limit switch (X4 or X5)
indicating the container required for storage.
4) The program continues by lowering the pickup arm (Y0) until the lower limit switch (X2) is
reached.
5) The collected ball being is released (Y1 is reset).
6) The pickup arm is retracted (Y2) once more.
7) The pickup arm is traversed back (Y4) to the zero-point (X1).
Y3
Y4
X12 Y7
X1
X3
X4 X5
X2
X0
Y1
Y2
Y0
Points to note
• The Selective Branch is used to choose the delivery program for either small ball
bearings or large ball bearings. Once the destination has been reached (i.e. step S24
or S27 has been executed) the two independent program flows are rejoined at step
S30.
• The example program shown works on a single cycle, i.e. every time a ball is to be
retrieved the start button (X12) must be pressed to initiate the cycle.