



















FX Series Programmable Controllers STL Programming 3
3-19
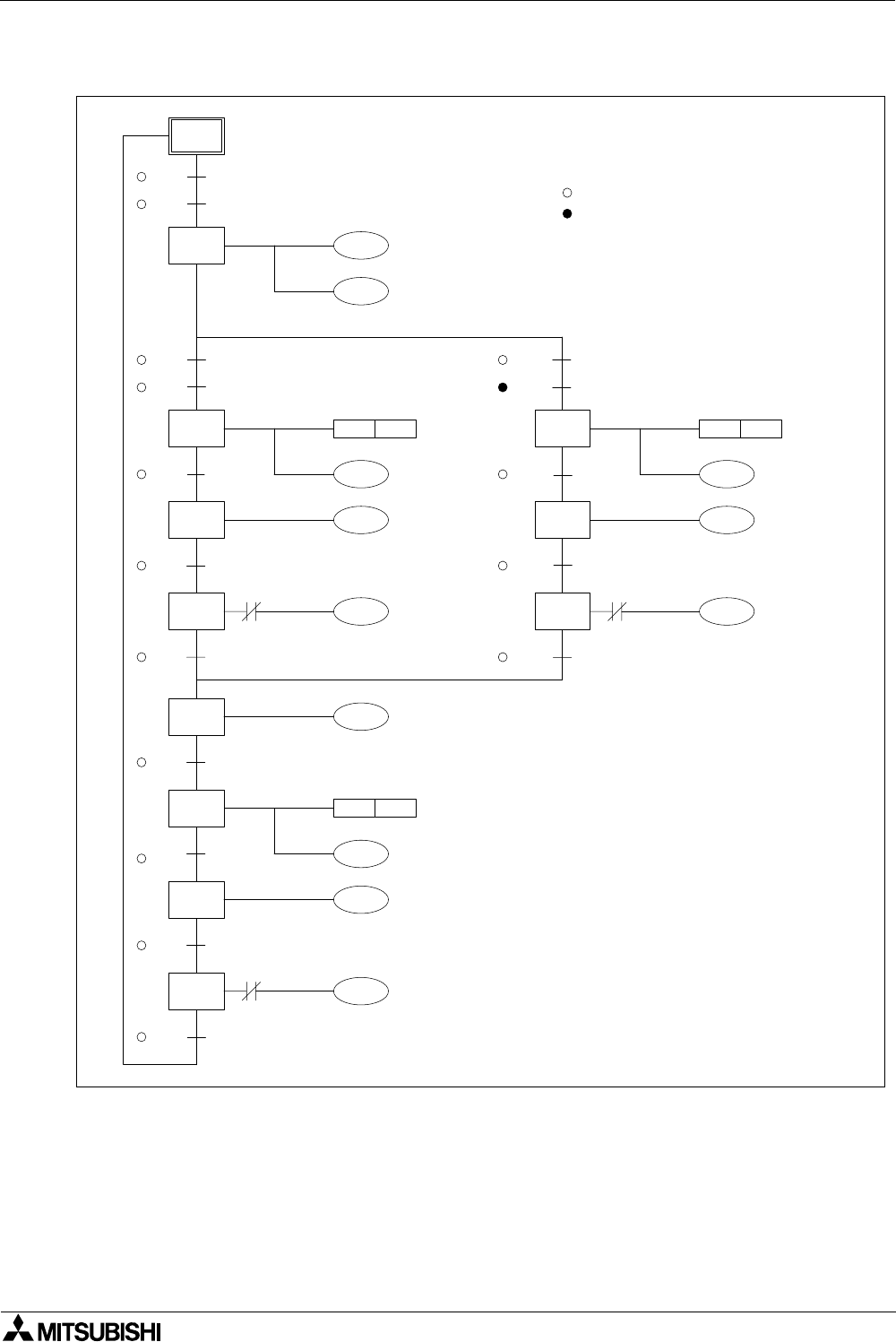
Full STL flow diagram/program.
Y0
T0
T1
S 0
X12
Y7
X2
T0
Y2
Y3
X4
RST Y1
K20
S 21
S 22
SET Y1
K10
S 23
T1
S 24
T2
X3
T0
T1
X2
Y2
Y3
X5
S 25
SET Y1
K10
S 26
T1
S 27
X3
X4 X5
T2
S 32 Y2
K10
S 30
X2
S 31
Y0
X3
S 33 Y4
X1
X1
Start
Zero-point arrival
Lower pickup arm
This example uses the dot notation to identify
normally open and normally closed contacts.
Normally open contacts
Normally closed contacts
Lower limit = small ball
Collect ball
Raise
pickup arm
Upper limit reached
Move to small ball bucket
Lower limit = large ball
Collect
ball
Raise
pickup arm
Upper limit reached
Move to large ball bucket
Lower pickup arm
Lower limit reached
Release ball
Raise pickup arm
Upper limit reached
Return to zero-point
Zero-point reached