



















Using Intelligent Output Terminals
Operations
and Monitoring
4–26
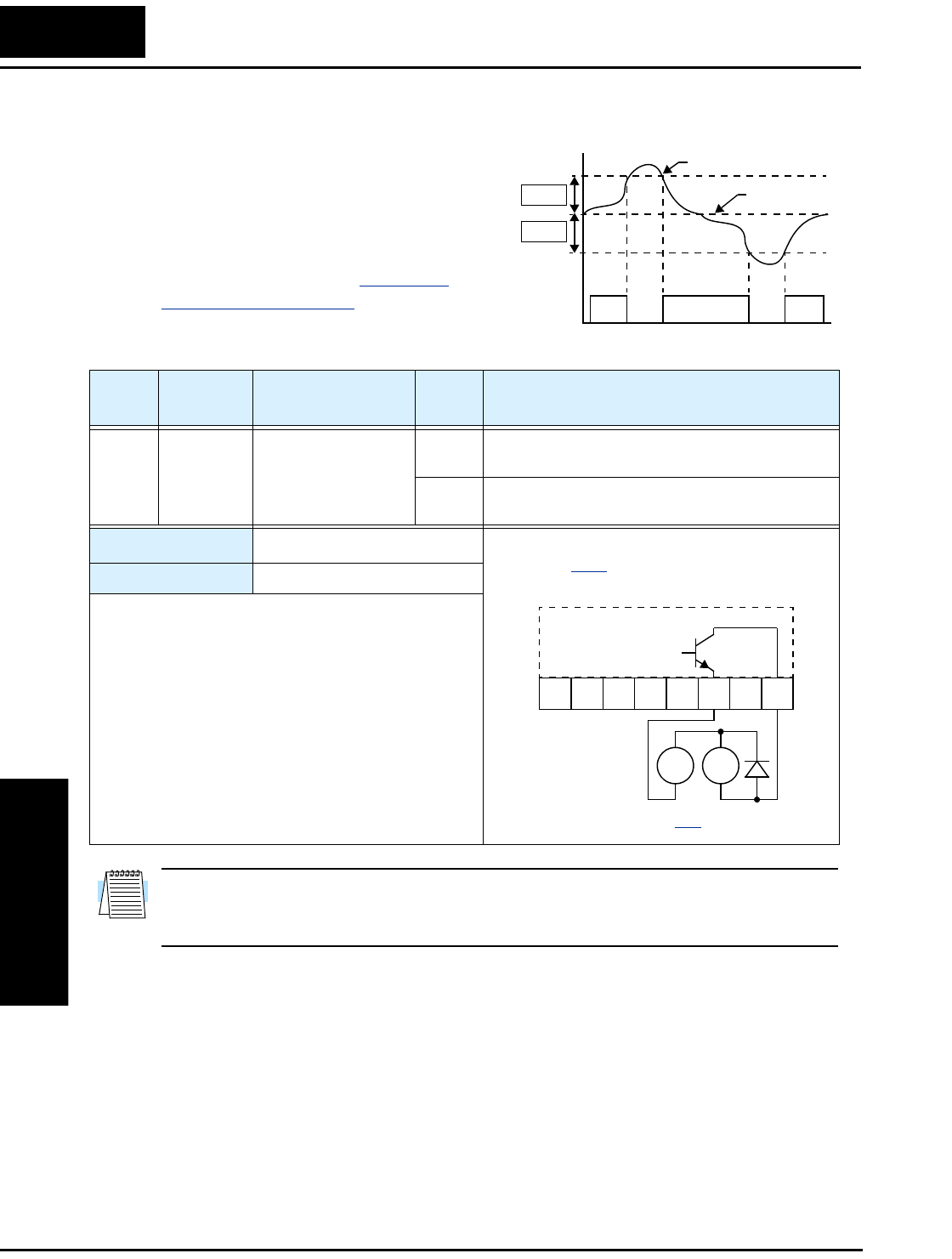
Output Deviation for PID Control
The PID loop error is defined as the
magnitude (absolute value) of the differ-
ence between the Setpoint (target value)
and the Process Variable (actual value).
When the error magnitude exceeds the
preset value for C_44, the [OD] terminal
signal turns ON. Refer to “
PID Loop
Operation” on page 4–32.
NOTE: The example circuit in the table above drives a relay coil. Note the use of a
diode to prevent the negative-going turn-off spike generated by the coil from damaging
the inverter’s output transistor.
[OD]
Signal
SP, PV
C44
C44
1
0
t
ONON
Setpoint
Process variable
Option
Code
Terminal
Symbol
Function Name
Output
State
Description
04 OD Output Deviation for
PID Control
ON when PID error is more than the set threshold for
the deviation signal
OFF when PID error is less than the set threshold for
the deviation signal
Valid for outputs:
11, 12
Required settings: C_44
Notes:
•
The default difference value is set to 3%. To change
this value, change parameter C_44 (deviation
level).
Example (requires output configuration—
see page 3–36
):
RY
+
–
See I/O specs on page 4–6.
12 11LH O
OI FM
CM2
Inverter output
terminal circuit
OD