



















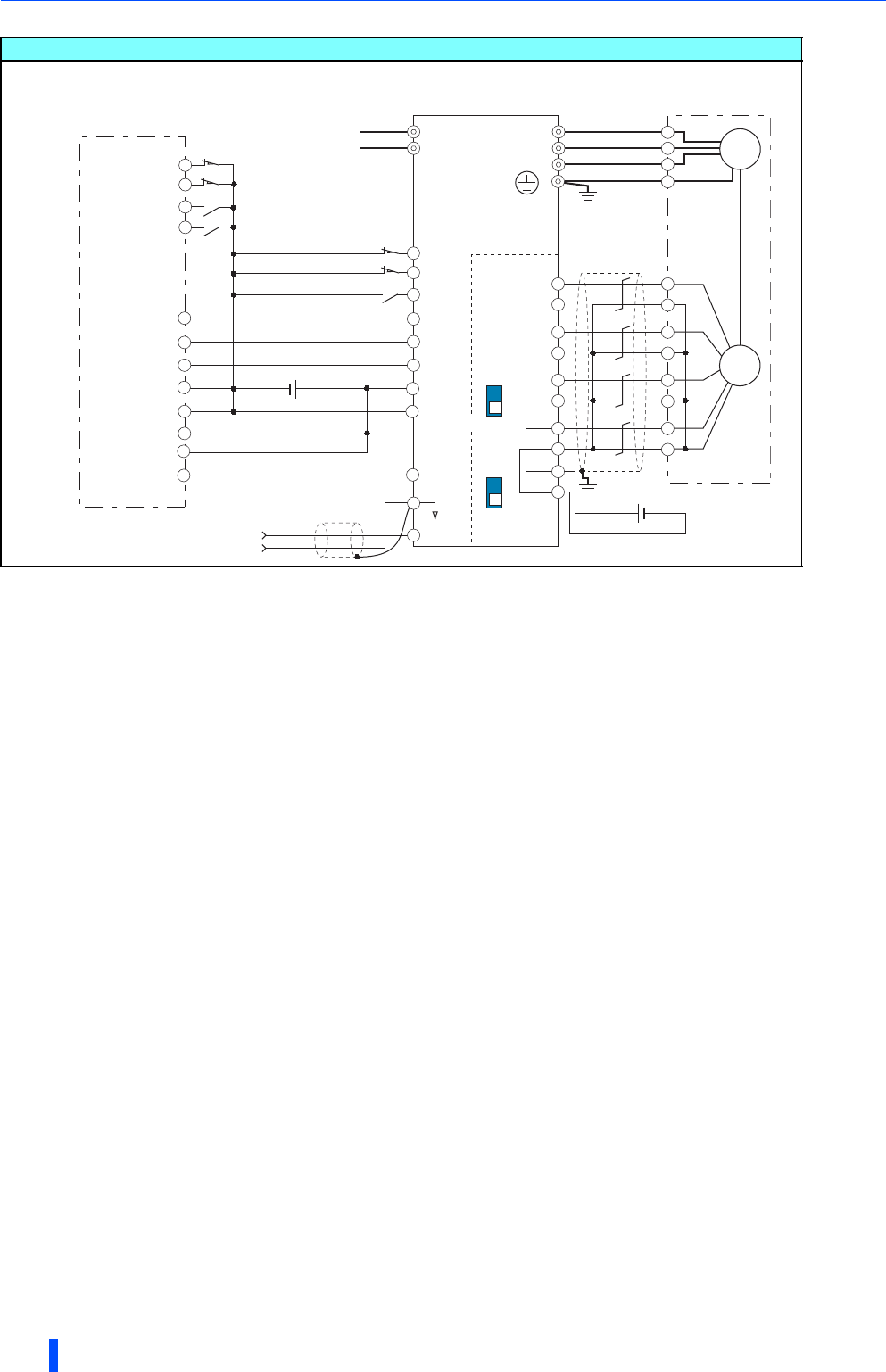
Connection of motor with encoder (vector control)
54
INSTALLATION AND WIRING
• Position control
Vector control dedicated motor, 12 V complementary
The pin number differs according to the encoder used.
Speed, control, torque control, and position control by pulse train input are available with or without the Z-phase being
connected.
Connect the encoder so that there is no looseness between the motor and motor shaft. Speed ratio must be 1:1.
Earth (ground) the shield of the encoder cable to the enclosure using a tool such as a P-clip. (Refer to page 55.)
For the complementary, set the terminating resistor selection switch to OFF position. (Refer to page 51.)
A separate power supply of 5 V / 12 V / 15 V / 24 V is necessary according to the encoder power specification.
When the encoder output is the differential line driver type, only 5 V can be input.
Make the voltage of the external power supply the same as the encoder output voltage, and connect the external
power supply between PG and SD.
For terminal compatibility of the FR-JCBL, FR-V7CBL, and FR-A8AP, refer to page 53.
Assign the function using Pr.178 to Pr.184, Pr.187 to Pr.189 (input terminal function selection).
When position control is selected, terminal JOG function is invalid and simple position pulse train input terminal
becomes valid.
Assign the function using Pr.190 to Pr.194 (output terminal function selection).
Vector control
dedicated motor
Torque limit command
(±10V)
1
5
(+)
(-)
∗4 ∗6
∗3
PA1
FR-A8AP
PA2
PB1
PB2
PZ1
PZ2
PG
PG
SD
SD
Forward stroke end
Reverse stroke end
Pre-excitation/servo on
Clear signal
Pulse train
Sign signal
Preparation ready signal
STF
STR
LX
∗7
CLR ∗7
CLEAR
JOG
∗8
NP ∗7
∗1
Differential
line driver
Terminating
resistor
ON
OFF
U
V
W
U
V
W
E
A
Earth
(ground)
∗2
B
C
D
F
G
S
R
IM
PLG
Inverter
Positioning unit
MELSEC-Q QD75P[]N/QD75P[]
MELSEC-L LD75P[]
12VDC
power supply
(+)
(-)
∗5
PULSE F
PULSE R
PULSE COM
CLRCOM
RDYCOM
READY
PC
RDY ∗9
SE
FLS
RLS
DOG
STOP
COM
24VDC power supply
Complementary
P/+
N/-
To converter unit