4Software
List of commands
4-130
4 Software
4.1 List of commands
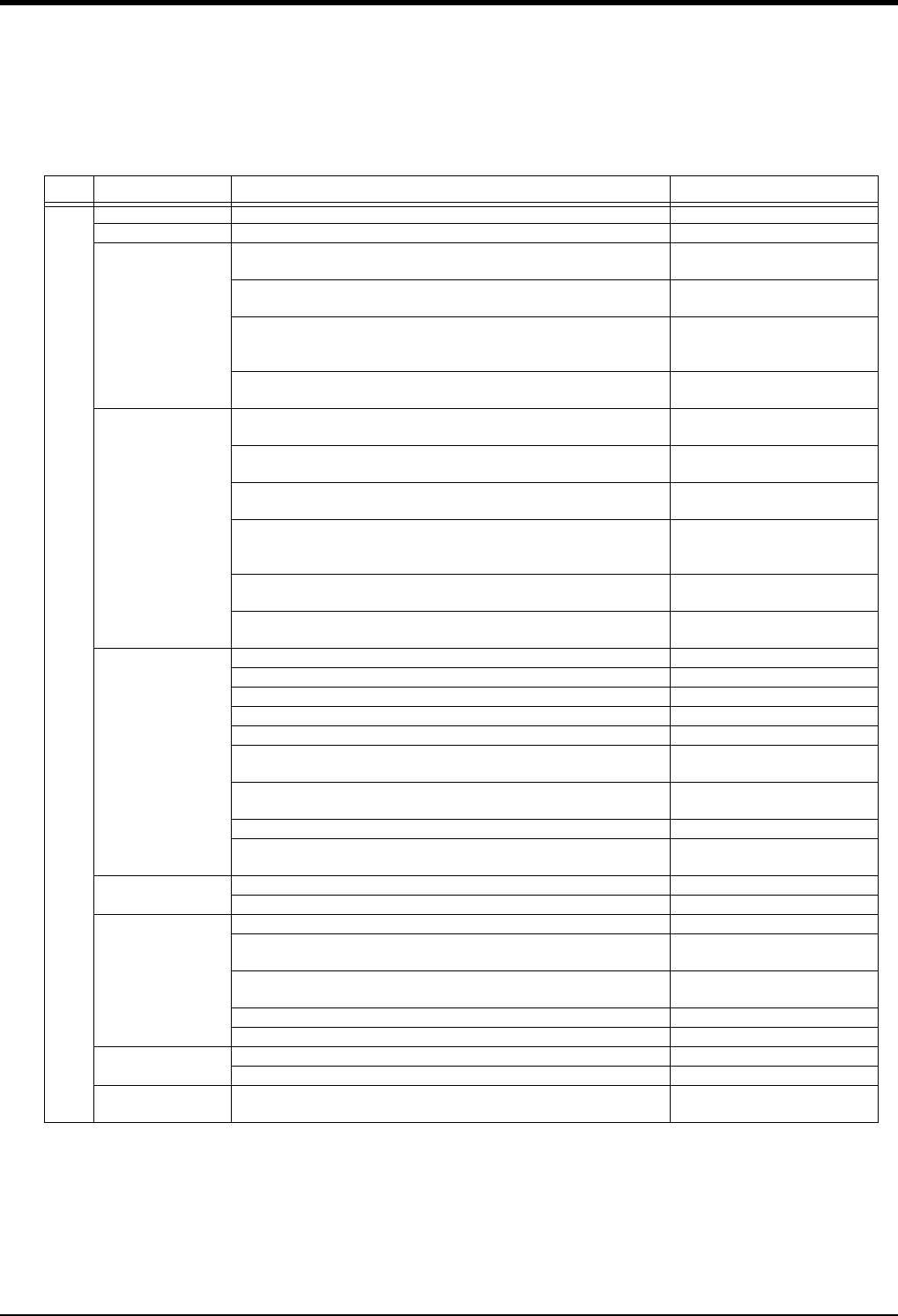
The available new functions in MELFA-BASIC V are given in Table 4-1.
Table 4-1 : List of MELFA-BASIC V commands
Type Class Function Input format (example)
Position and operation control
Joint interpolation Moves to the designated position with joint interpolation. Mov P1
Linear interpolation Moves to the designated position with linear interpolation. Mvs P1
Circular interpolation Moves along a designated arc (start point →passing point→start point
(end point)) with 3-dimensional circular interpolation (360 degrees).
Mvc P1,P2,P1
Moves along a designated arc (start point → passing point → end point)
with 3-dimensional circular interpolation.
Mvr P1,P2,P3
Moves along the arc on the opposite side of a designated arc (start point
→ reference point → end point) with 3-dimensional circular interpola
-
tion.
Mvr2 P1,P9,P3
Moves along a set arc (start point → end point) with 3-dimensional cir
-
cular interpolation.
Mvr3 P1,P9,P3
Speed designation Designates the speed for various interpolation operations with a per
-
centage (0.1% unit).
Ovrd 100
Designate the speed for joint interpolation operation with a percentage
(0.1% unit).
JOvrd 100
Designates the speed for linear and circular interpolation with a numeri
-
cal value (mm/s unit).
Spd 123.5
Designates the acceleration/deceleration time as a percentage in
respect to the predetermined maximum acceleration/deceleration. (1%
unit)
Accel 50,80
Automatically adjusts the acceleration/deceleration according to the
parameter setting value.
Oadl ON
Sets the hand and work conditions for automatic adjustment of the
acceleration/deceleration.
Loadset 1,1
Operation Adds a process unconditionally to the operation. Wth
Adds a process conditionally to the operation. WthIf
Designates smooth operation. Cnt 1,100,200
Performance of movement is upgraded corresponding to the application. MvTune 4
Designates the positioning completion conditions with a No. of pulses. Fine 200
Designates the positioning completion conditions with a distance in a
straight line
Fine 1, P
Designates the positioning completion conditions with a joint interpola
-
tion.
Fine 0.5, J, 2
Turns the servo power ON/OFF for all axes. Servo OFF
Limits the operation of each axis so that the designated torque is not
exceeded.
Torq 4,10
Position control Designates the base conversion data. Base P1
Designates the tool conversion data. Tool P1
Float control The robot arm rigidity is lowered and softened. (XYZ coordinate system) Cmp Pos ,&B00000011
The robot arm rigidity is lowered and softened. (JOINT coordinate sys
-
tem)
Cmp Jnt ,&B00000011
The robot arm rigidity is lowered and softened. (TOOL coordinate sys
-
tem)
Cmp Tool ,&B00000011
The robot arm rigidity is returned to the normal state. Cmp Off
The robot arm rigidity is designated. CmpG
1.0,1.0,1.0,1.0,1.0,1.0,1.0,1.0
Pallet Defines the pallet. Def Plt 1,P1,P2,P3,P4,5,3,1
Operates the pallet grid point position. Plt 1,M1
Singular point pas
-
sage
Move to a specified position using linear interpolation passing through a
singular point.
Mvs P1 Type 0,2































































































































































































