



















3 Controller
Emergency stop input and output etc.
3-82
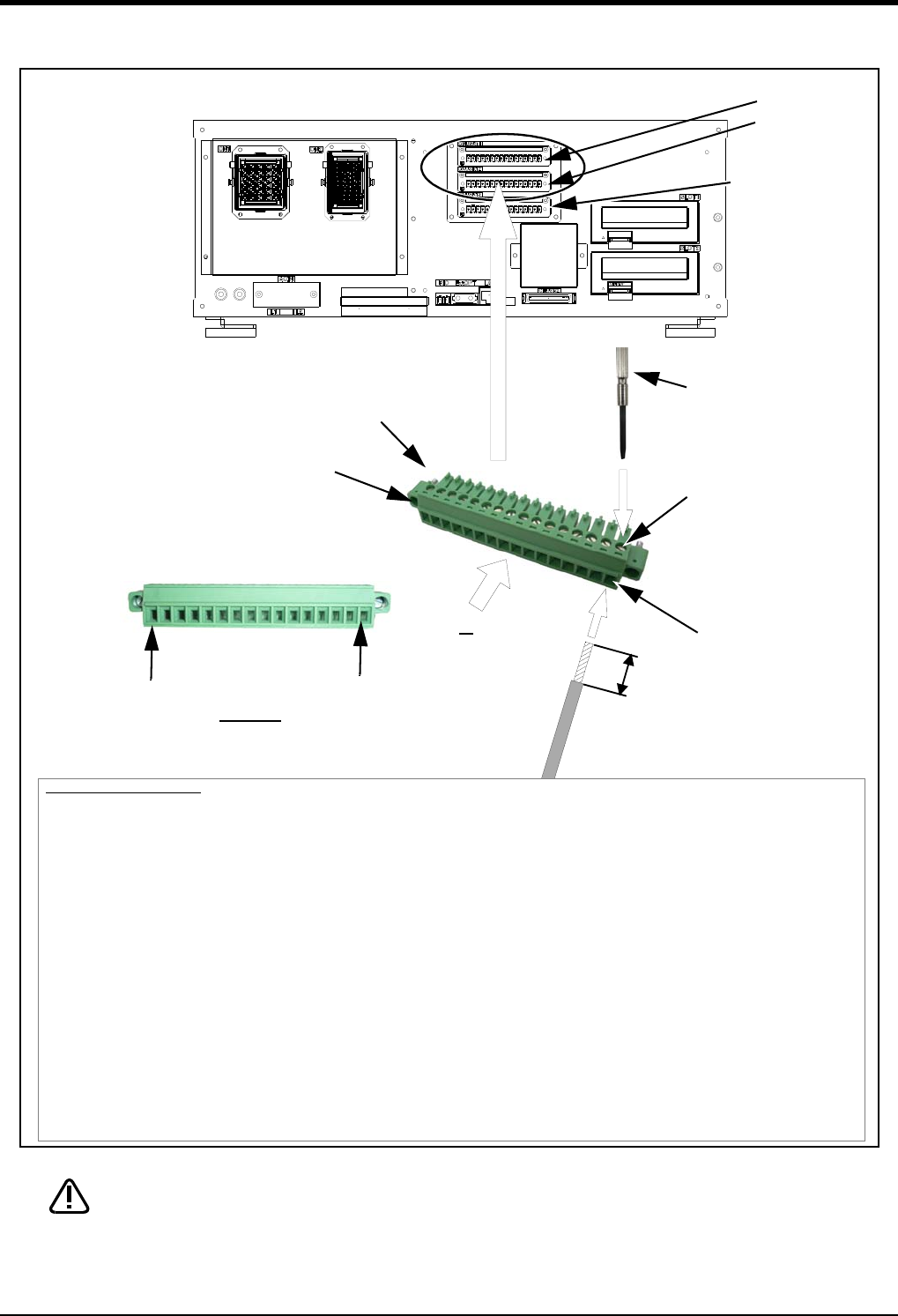
Fig.3-11 : Method of wiring for external emergency stop connection (CR750 (CNUSR11/12))
Makes sure that there is no mistake when connecting to the target connectors.
Connecting incorrectly will result in the robot breaking down or malfunctioning.
The connector on the controller side that connects to the user wiring connector is
CNUSR11 or CNUSR12. Be careful not to connect to CNUSR13 as the robot will not
operate properly.
<CR750 controller>
CNUSR11/12 connector
CNUSR11
CNUSR12
Driver
*Recommendation driver
size: 2.5mm.
Cable fixing screw
Cable insert point
7mm
A
View A
16
1
Connector fixing screw
(Two places)
Pin number of connector
Connecting cable
(AWG #26-16 (0.14mm-1.5mm
2
))
Connection procedure
Insert the connection cable into the appropriate pin of the user wiring connector that accompanies the product. Fix
it securely with a screw and connect the connector to the CNUSR11/CNUSR12 connector at the back of the
controller.
Please use an AWG #26 to 16 (0.14 to 1.5mm
2
) connector cable.
1) Prepare the user wiring connector that accompanies the product.
2) Loosen the cable fixing screw at the point where the cable is to be inserted. Please use a screwdriver head
with a width of 2.5mm to loosen the screw.
3) Peel the insulation of the connecting cable to 7mm, and insert it into the cable slot of the corresponding con
-
nector.
4) Be sure to fix the inserted cable securely by fastening a cable fixing screw.
(tightening torque of 0.22 to 0.25Nm)
5) After the necessary cables save been fixed, connect the connector to the connector (CNUSR11/12) that cor
-
responds with the controller. Connect so that the cable fixing screw is comes on top, and make sure to fix
securely by fastening connector fixing screws in two places. A screwdriver head with a width of 2.5mm should
be used to fix screws (tightening torque of 0.22 to 0.25Nm).
This concludes the connection procedure.
Connector for user wiring
Reference: CNUSR13
(Connect the encoder,
when using the
tracking function)
* The controller is an example.
CAUTION