


















2 Robot arm
2-18
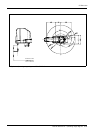
(3) Relation between offset length and the maximum speed
A function to optimize the maximum speed of each axis according to the offset length will be activated. (Refer to
Fig. 2-5)
Fig.2-5 : Relationship of the offset length and maximum velocity
[Supplementary explanation 1]: The setting which shortens execution time
The execution time can be improved by using the following methods.
1) Perform continuous path operation using the Cnt command.
2) Control the optimum acceleration/deceleration using the Oadl command.
3) Control the optimum speed using the Spd command.
4) Setting a larger value in the optimum acceleration/deceleration adjustment rate parameter: JADL. (Maxi-
mum 100)
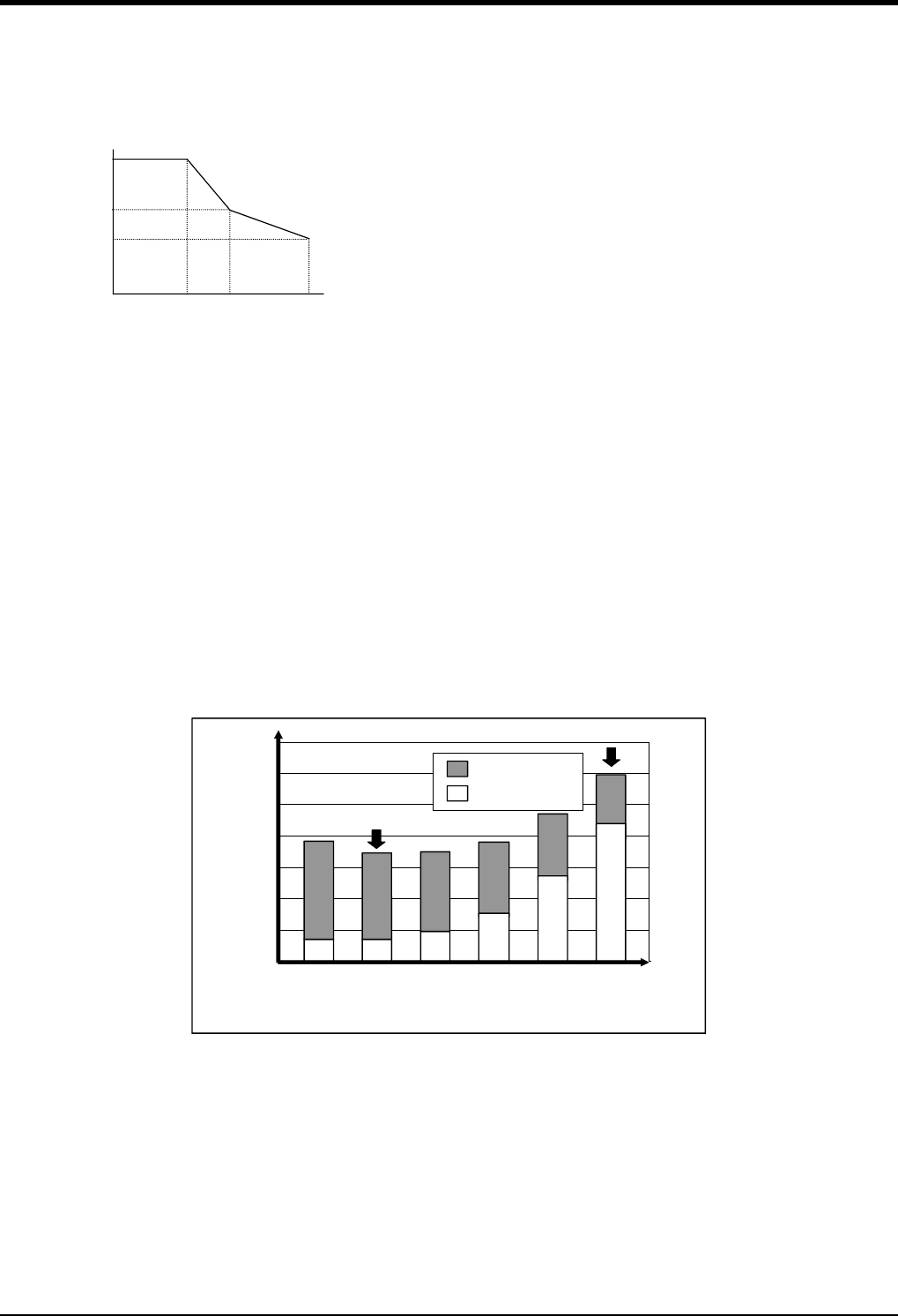
The moving time can be shortened by setting a larger value in the optimum acceleration/deceleration adjustment rate
parameter (JADL). In this robot, the acceleration/deceleration speed is initialized to allow continuous moving with a
short wait time (setting of B in the Fig. 2-6).
This setting is suited for continuous operations that have a short tact time, such as palletizing work.
Conversely, if quick moves (short moving time) are required, such as L/UL work on machined parts, the acceleration/
deceleration speed can be increased by initial setting (setting of A in the Fig. 2-6).
However, please note that some setting values of acceleration/deceleration speed tend to cause overload and overheat
errors. In such a case, extend the wait time, reduce the acceleration/deceleration speed, or decrease the moving speed.
Fig.2-6 : Relationship between Acceleration/deceleration Speed and Tact Time (Conceptual Drawing)
100
42
0
0
100
オフセット量(mm)
(%)
40
60
60
Acceleration/deceleration
speed ratio(%)
Offset length (mm)
Tact time/
1
cycle
O
peration time
Wait time
B
A
Increased acceleration/deceleration speed
x Accel instruction [%] x parameter JADL [%]
Acceleration/deceleration speed [m/sec
2
]
= optimum acceleration/deceleration speed [m/sec
2
]