



















2-37
Tooling
2 Robot arm
2.5 Tooling
2.5.1 Wiring and piping for hand
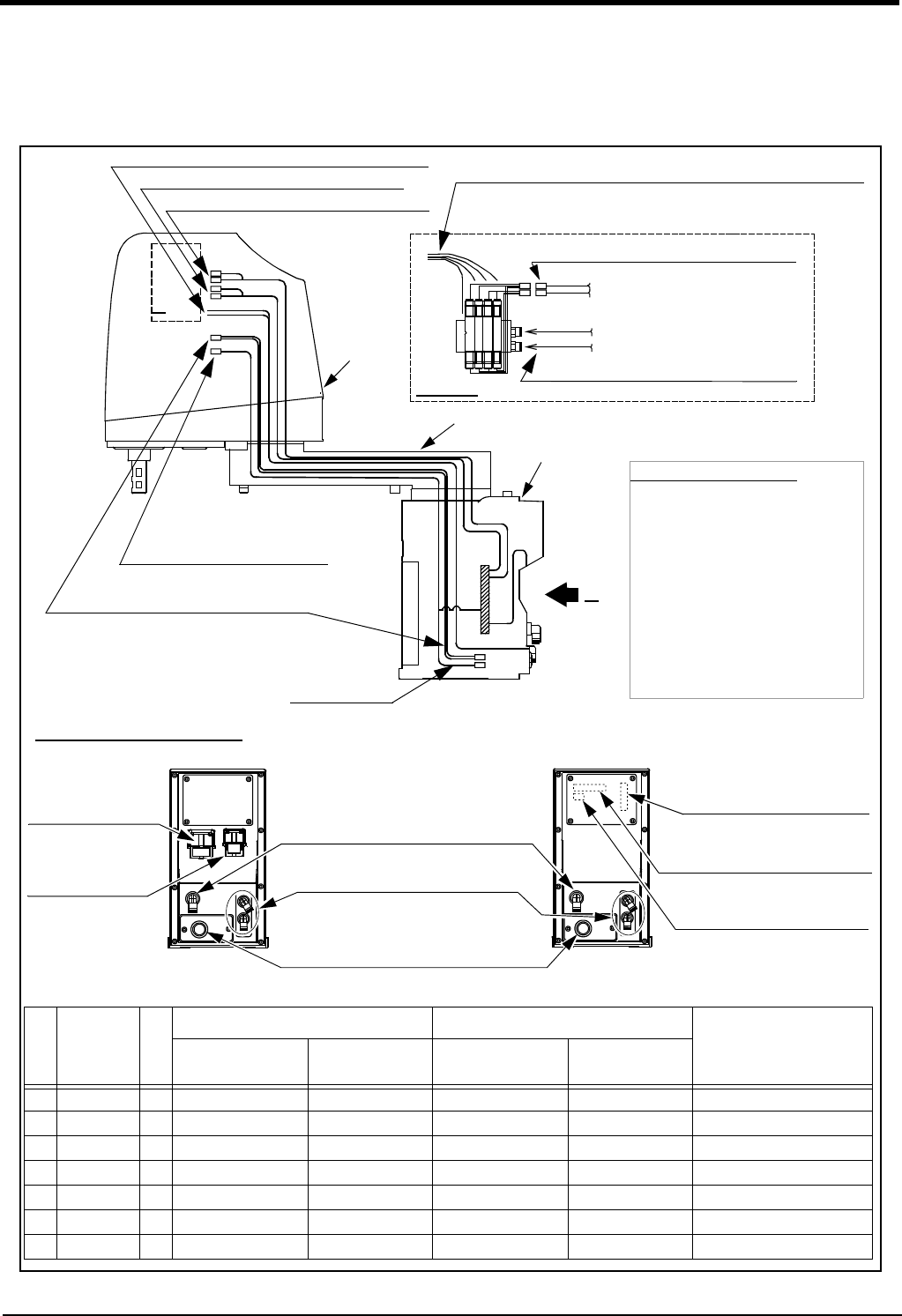
Shows the wiring and piping configuration for a standard-equipped hand.
Fig.2-23 : Wiring and piping for hand
Connector and pneumatic coupling
No. Name Qty.
Robot side (Robot arm side) Counter side (customer-prepared)
Manufacturer
Connectors,
couplings
Connector pins Connector Connector pins
(1) Coupling 2 UKBL6 - - - Koganei Corporation
(2) Coupling 1 UKBL8 - - - Koganei Corporation
(3) Connector 2 1-1717834-4 1318108-1 1-1318115-4 1318112-1 Tyco Electronics AMP
(4) Connector 2 1-1717834-3 1318108-1 1-1318115-3 1318112-1 Tyco Electronics AMP
(5) Connector 1 1-1318117-3 1318112-1 1-1318120-3 1318108-1 Tyco Electronics AMP
(6) Connector 1 2-1717834-4 1318108-1 2-1318115-4 1318112-1 Tyco Electronics AMP
(7) Connector 1 TM21P-88P - - -
View A
A
(4)Hand input signal connector (HC1, 2)
(3)Hand output signal connector (GR1, 2)
Secondary piping pneumatic hose (Option, or customer prepared)
φ4 hose (Max. 8 hoses)
Primary piping pneumatic hose (AIR OUT, RETURN)
Solenoid valve set (Option)
(3)Hand output signal connector (GR1, 2)
Primary piping pneumatic hose
(AIR OUT, RETURN)
(6)The signal wire only for
the multifunctional hand.
(7)Ethernet cable (8 cores)
(5)Spare wire
* If the LAN connector is cut and connector of
customer preparation is connected, it can be
use as other usages.
Pulling out wiring and piping
Wiring and piping can be passed
through the inside of the shaft.
It can also be pulled out externally
from the rear of the No. 2 arm by
using the Page 59, "(8) External
Wiring/Piping box".
Ethernet cables and the power supply
chord for remote input/output can be
pulled out from the grommet at the
rear of the base section.
Note) On the clean specifications it is
necessary to seal the cable
aperture closed.
(Robot arm side)
(Robot arm side)
No.2 arm
No.1 arm
Robot base
(two cores + two wires)
(two wires)
(1) Primary piping pneumatic
coupling (φ6)
(AIR IN, RETURN)
Cable apertures of Ethernet cable and
signal wire only for the multifunctional hand
(Grommet)
Machine cable connector
(power supply) (AMP1, AMP2)
(Inside the cover)
Machine cable connector
(for signal) (CN2)
(Inside the cover)
(2)Vacuum (VACUUM) (φ8)
(Only for clean specification)
Machine cable connector (for
brake) (BRK)
(Inside the cover)
<Connection with the CR750 controller>
Machine cable con-
nector (for signal)
(CN2)
Machine cable con-
nector (power supply)
(CN1)
Robot arm rear side: View B
<Connection with the CR751 controller>
B