

















6Safety
Safety
6-136
6 Safety
6.1 Safety
Measures to be taken regarding safety of the industrial robot are specified in the "Labor Safety and Sanitation
Rules". Always follow these rules when using the robot to ensure safety.
6.1.1 Self-diagnosis stop functions
This robot has the self-diagnosis stop functions shown in Table 6-1 and the stop functions shown in Table 6-2
for safe use.
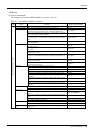
Table 6-1 : Self-diagnosis stop functions
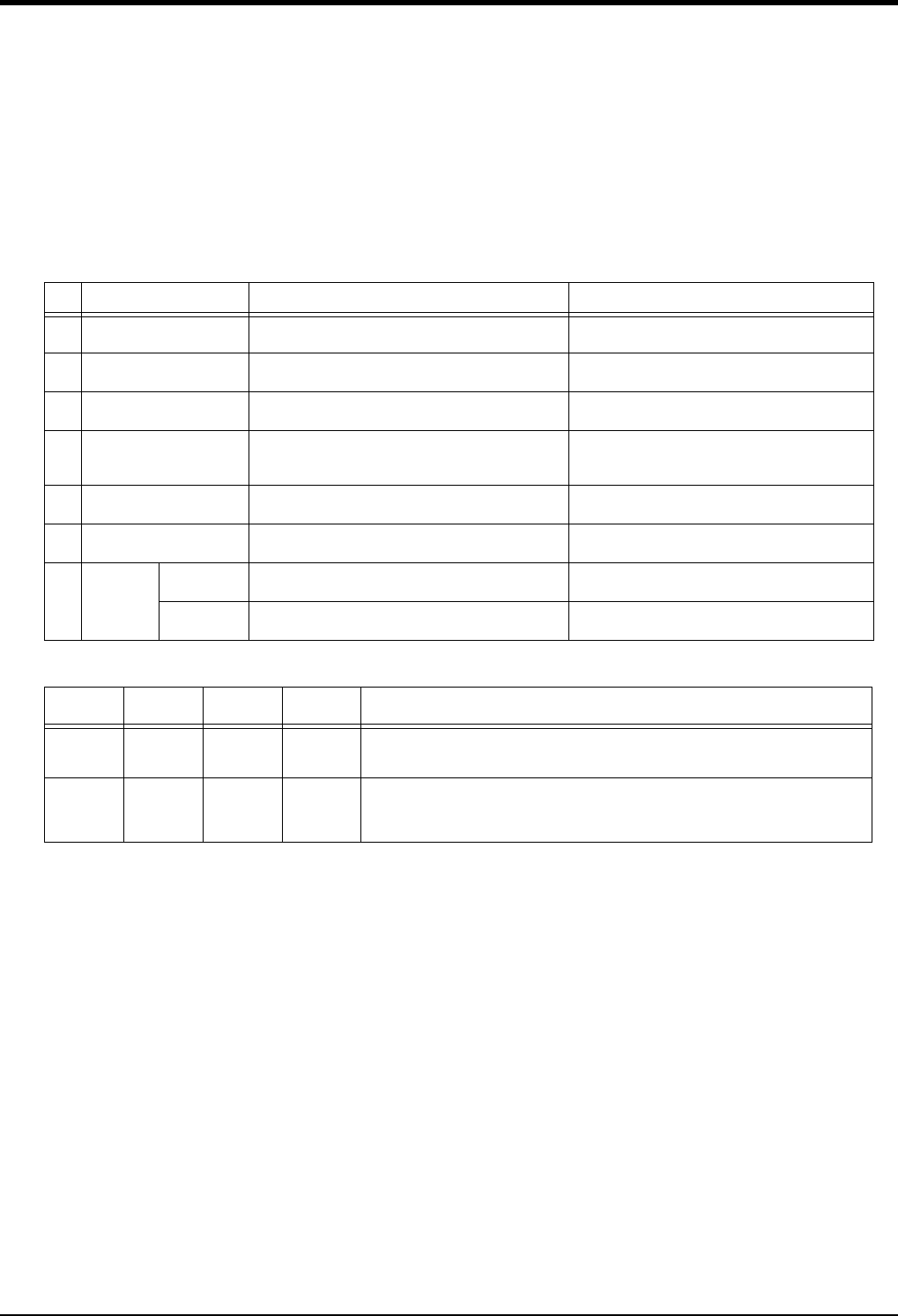
Table 6-2 : List of stop functions
No. Function Details Remarks
1 Overload protection func-
tion
Activates when the total servo current time exceeds
the specified value.
The drive circuit is shut off. The robot stops, and
an alarm displays.
2 Overcurrent diagnosis
function
Activates when an overcurrent flows to the motor
circuit.
The drive circuit is shut off. The robot stops, and
an alarm displays.
3 Encoder disconnection
diagnosis function
Activates when the encoder cable is disconnected. The drive circuit is shut off. The robot stops, and
an alarm displays.
4 Deflection over diagnosis
function
Activates when an error occurs between the com
-
mand value and actual position, and the error
exceeds the specified amount.
The drive circuit is shut off. The robot stops, and
an alarm displays.
5 AC power voltage drop
diagnosis function
Activates when the AC power voltage drops below
the specified value.
The drive circuit is shut off. The robot stops, and
an alarm displays.
6 CPU error detection func
-
tion
Activates when an error occurs in the CPU. The drive circuit is shut off. The robot stops, and
an alarm displays.
7 Overrun
prevention
function
Software limit
detection
This is the limit provided by the software to enable
operation only in the operation range.
The drive circuit is shut off. The robot stops, and
an alarm displays.
Mechanical
stopper
This is the mechanical stopper provided outside the
software.
The robot mechanically stops, and function 1 or 2
activates.
Stop
function
Operation
panel
Note1)
Note1) Only CR750 controller has operation panel.
Teaching
pendant
External
input
Details
Emergency
stop
◯ ◯ ◯
This is the stop with the highest degree of emergency. The servo power is shut off,
and the mechanical brakes (all axes) activate to stop the robot.
To recover, reset the alarm, and turn the servo ON with the servo ON command.
Stop ◯ ◯ ◯
This is a stop operation with a high degree of emergency. The robot immediately
decelerates and stops.
Note that the servo power is not shut off. Use this when using the collision evasion
sensor, etc.