



















53
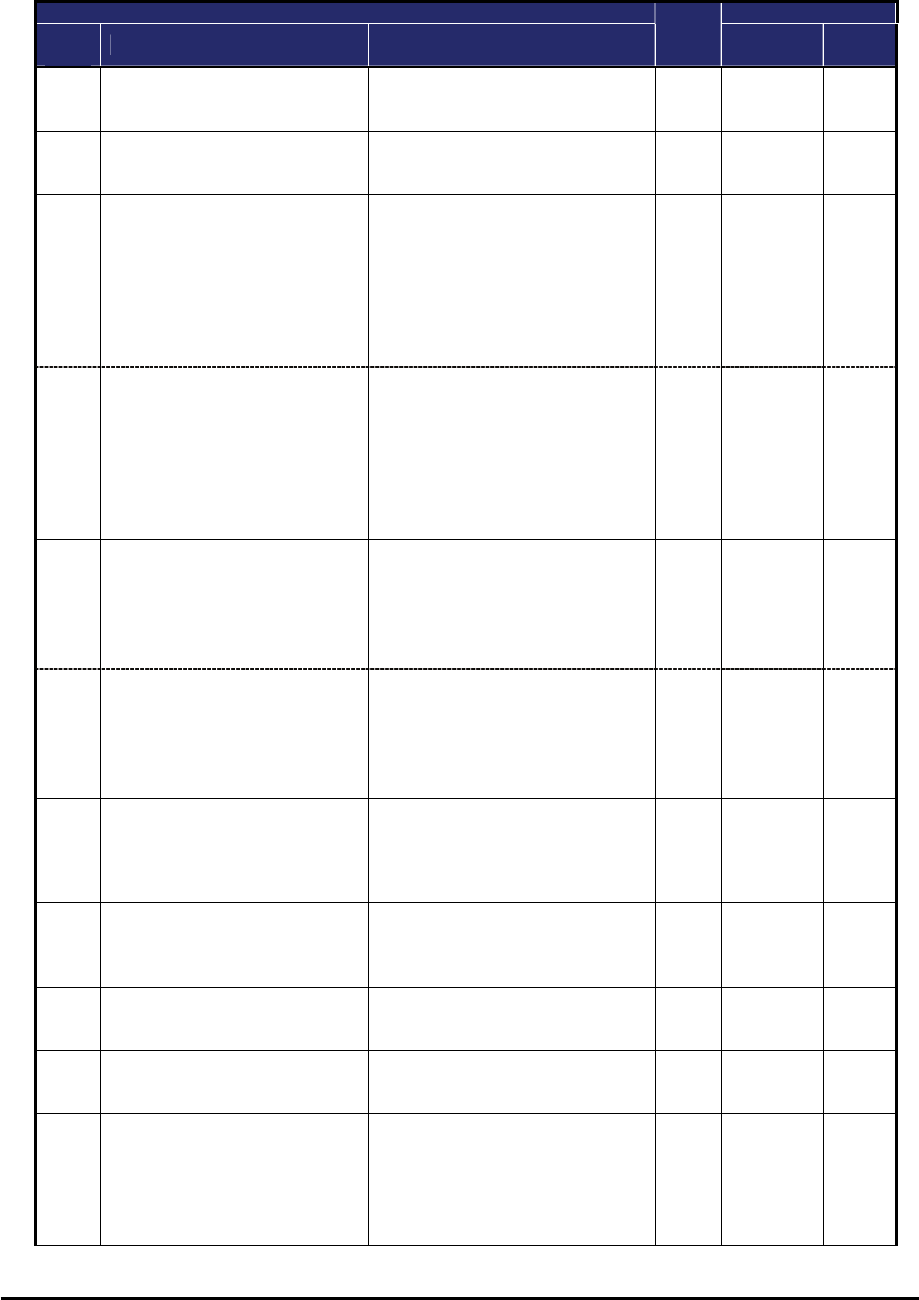
“A” Function Defaults
Func.
Code
Name Description
Run
Mode
Edit
Initial data Units
a058
DC braking time at start Sets the duration for DC braking,
range is from 0.0 to 60.0
seconds
U
0.0 sec.
a059
Carrier frequency during DC
braking
Carrier frequency of DC braking
performance, range is from 2.0 to
15.0kHz
U
5.0 sec.
A061
Frequency upper limit Sets a limit on output frequency
less than the maximum
frequency (A004).
Range is from frequency lower
limit (A062) to maximum
frequency (A004).
0.0 setting is disabled
>0.0 setting is enabled
U
0.00 Hz
A261
Frequency upper limit,
2nd motor
Sets a limit on output frequency
less than the maximum
frequency (A204).
Range is from frequency lower
limit (A262) to maximum
frequency (A204).
0.0 setting is disabled
>0.0 setting is enabled
U
0.00 Hz
A062
Frequency lower limit Sets a limit on output frequency
greater than zero.
Range is start frequency (B082)
to frequency upper limit (A061)
0.0 setting is disabled
>0.0 setting is enabled
U
0.00 Hz
A262
Frequency lower limit,
2nd motor
Sets a limit on output frequency
greater than zero.
Range is start frequency (B082)
to frequency upper limit (A261)
0.0 setting is disabled
>0.0 setting is enabled
U
0.00 Hz
A063
A065
A067
Jump freq. (center) 1 to 3 Up to 3 output frequencies can
be defined for the output to jump
past to avoid motor resonances
(center frequency)
Range is 0.0 to 400.0 Hz
U
0.0
0.0
0.0
Hz
A064
A066
A068
Jump freq. width (hysteresis) 1
to 3
Defines the distance from the
center frequency at which the
jump around occurs
Range is 0.0 to 10.0 Hz
U
0.5
0.5
0.5
Hz
A069
Acceleration hold frequency Sets the frequency to hold
acceleration, range is 0.0 to
400.0Hz
U
0.00 Hz
A070
Acceleration hold time Sets the duration of acceleration
hold, range is 0.0 to 60.0
seconds
U
0.0 sec.
A071
PID enable Enables PID function,
three option codes:
00…PID Disable
01…PID Enable
02…PID Enable with reverse
output
U
00
−