



















Administration
RS400 25 ROS™ v3.5
1.5 IP Interfaces
These parameters provide the ability to configure IP connection parameters such as address,
network, and mask.
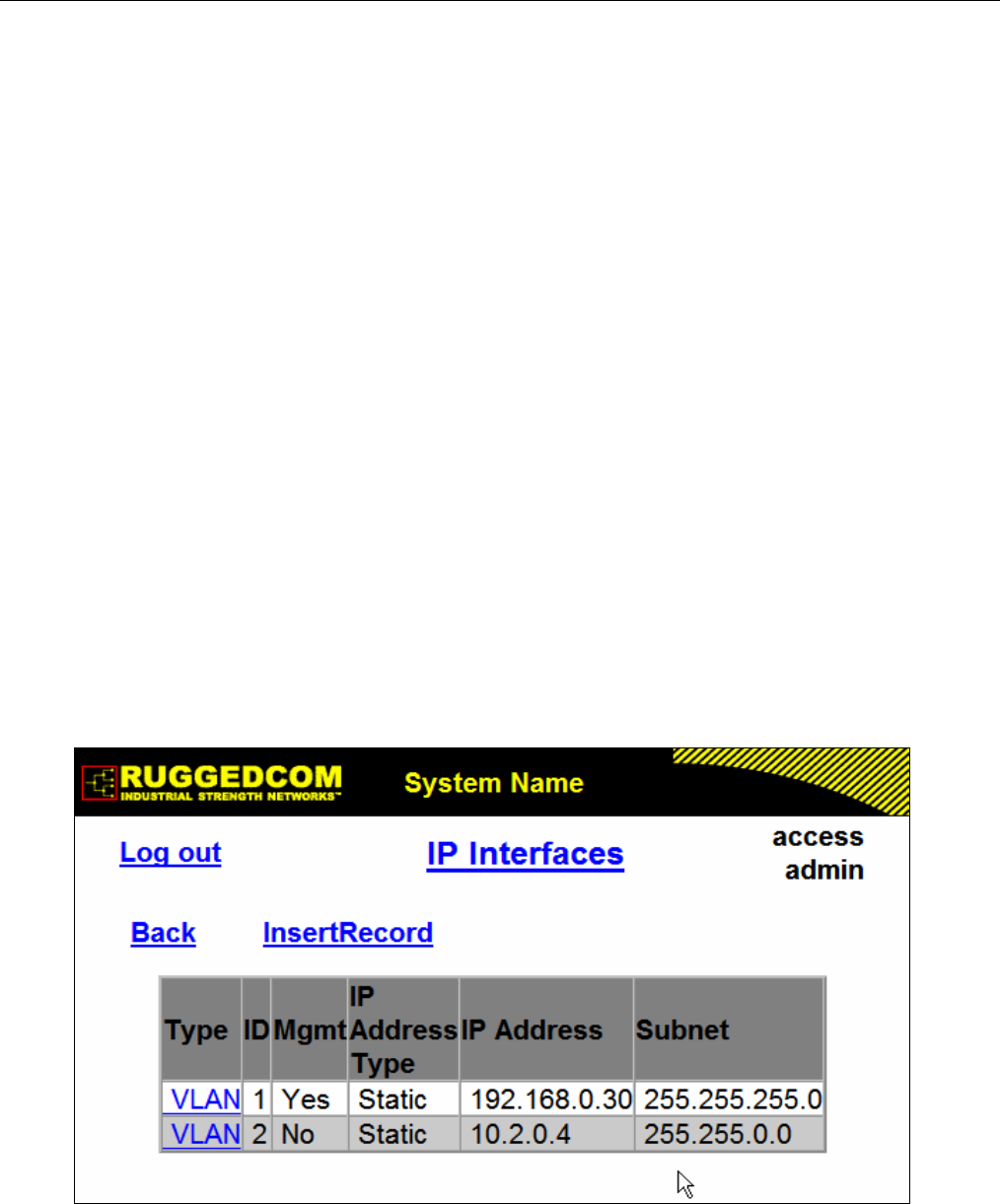
The user can configure an IP Interface for each subnet (VLAN). One of the interfaces is
configured as management interface. IP services: TFTP server, SNMP server, Telnet server,
SSH server, RSH server, Web server, authentication using RADIUS server, DHCP client,
BOOTP client, DHCP relay agent will be available only via management interface. Different IP
interfaces MUST NOT overlap, e.g. the subnet mask must be unique.
15 IP interfaces can be configured in the device. In VLAN unaware mode, and in devices that do
not act as switches (as RMC30), only one IP interface can be configured.
On non-management interfaces, only static IP addresses can be assigned.
On management interface, the user can choose from the following IP Address type: Static,
DHCP, BOOTP and Dynamic. Static IP Address type refers to the manual assignment of IP
address while DHCP, BOOTP and Dynamic IP Address types refer to the automatic assignment
of IP address.
DHCP is widely used in LAN environments to dynamically assign IP addresses from a
centralized server, which reduces the overhead of administrating IP addresses.
BOOTP is a subset of the DHCP protocol. ROS
TM
supports transfer of a BOOTFILE via BOOTP.
The BOOTFILE represents any valid ROS
TM
file such as config.csv. The name of BOOTFILE on
the BOOTP server must match the corresponding ROS
TM
file.
The Dynamic IP Address type refers to a combination of the BOOTP and DHCP protocols.
Starting with BOOTP, the system will try BOOTP and DHCP in a round-robin fashion until it will
get a response from the corresponding server.
Figure 7: IP Interfaces Table