



















The LED displays the data you input, the status of the robot,
and any error messages.
UCR-150L Robot UGR003/0900
4-4
OPERATION
V
IEWING
INFORMATION
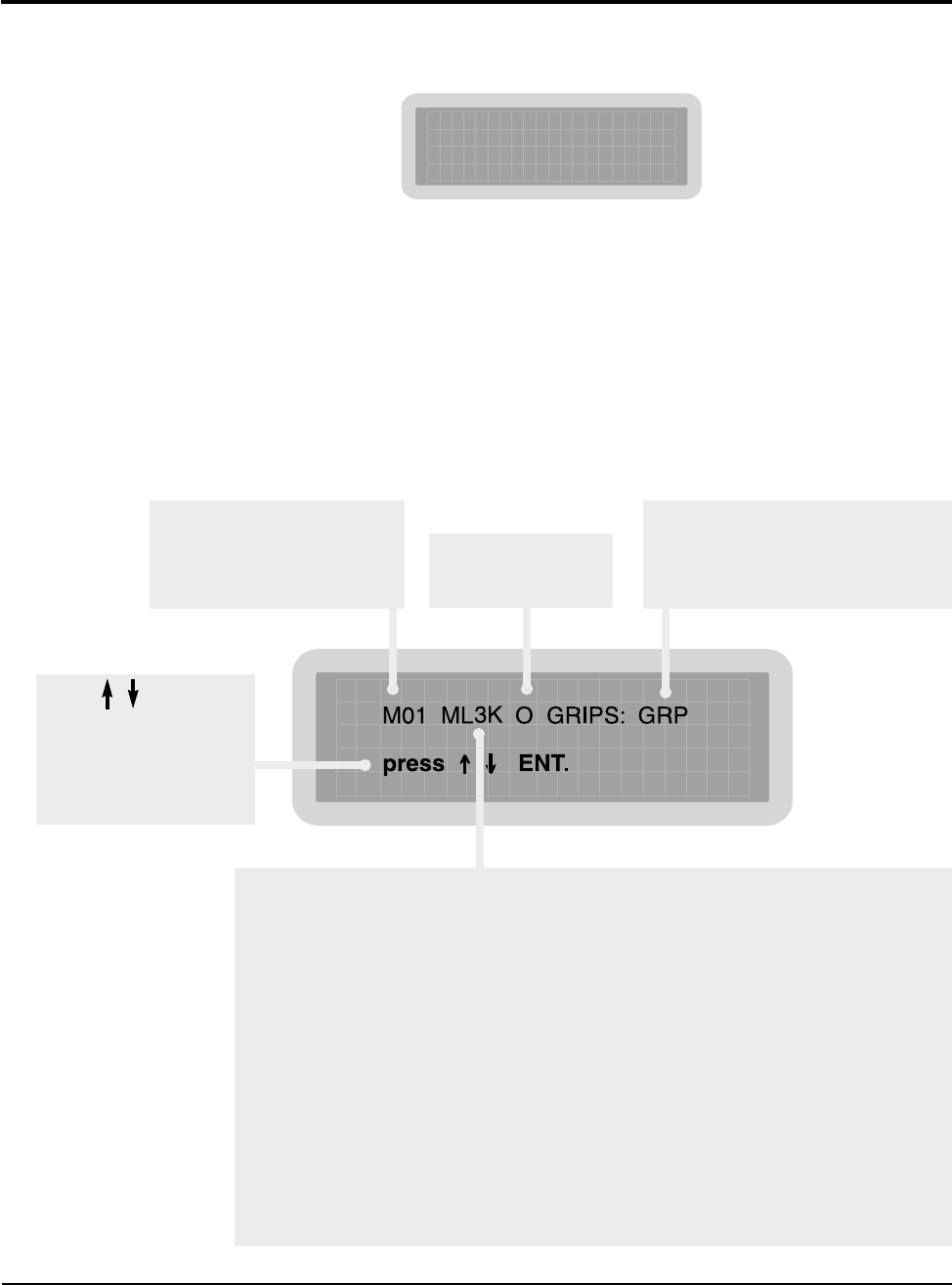
During normal operation the display provides:
● the current mold number
● the motion sequence
● current home position
● the current valve selection
● programming directions
Error codes display during an alarm or error. A typical display
during normal operation is:
press ENT.
Programming directions
to use the Up/Down
arrows to scroll, and
press the Enter button
to save the choice.
Home position
I - above the mold
O - outside the mold
Pick up position
Vertical motion
Main grip release
Vacuum release
GRIPS
GRIP Use grip solenoid valve
VAC Use vacuum solenoid valve
G+V Use grip and vacuum
solenoid valve
Mold Number
The current mold number;
control can be programmed
for up to seven different
molds, M01 to M07.
M Pick up from moveable mold
F Pick up from fixed mold
L L-shaped vertical motion
U U-shaped vertical motion
2 Grip release at arm second descend.
K Grip release at arm second descend and strip motion.
3 Grip release on the way, arm third extended.
M Grip release in the mold area.
2 Vacuum release at arm second descend.
K Vacuum release at arm second extend and strip motion.
3 Vacuum release on the way, arm third extended.
M Vacuum release in mold area.
Motion Sequence