



















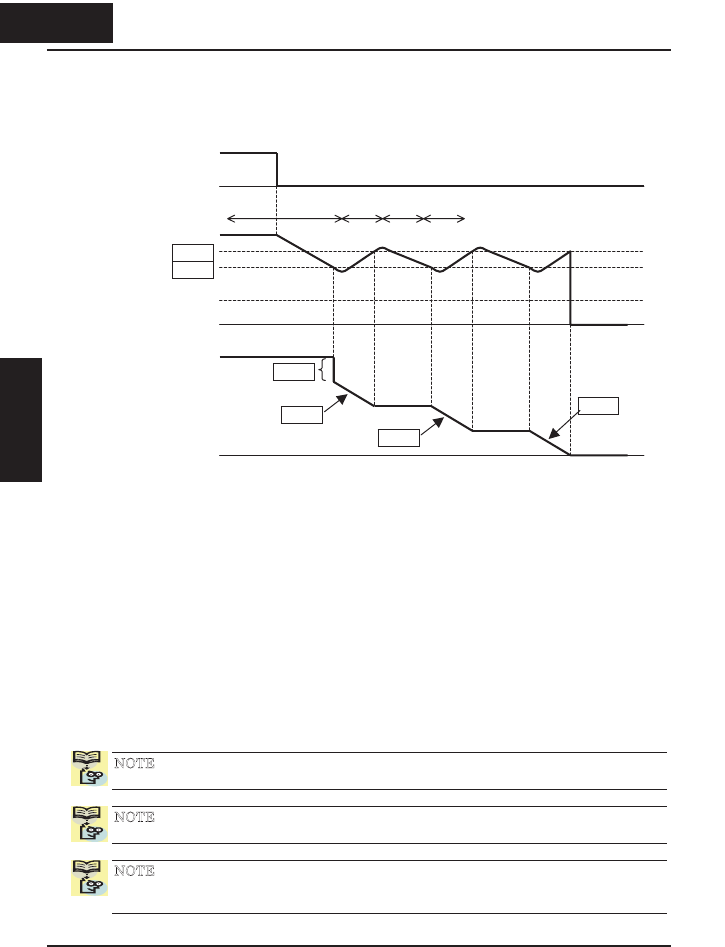
Controlled Stop Operation at Power Loss
Controlled stop operation at power loss helps avoid tripping or free-running (coasting)
of the motor when power is lost while in run mode. The inverter controls the internal
DC bus voltage while decelerating the motor, and brings the motor to a controlled stop.
Should power be lost while the inverter is in run mode, this function will have the
following effect:
c When the internal DC bus voltage of the inverter comes down to the set level of
B051, the inverter decreases the output frequency by the amount set in B054.
(During this interval the DC bus voltage rises due to regeneration, so does not reach
the UV level.)
d The inverter then continues deceleration according to the value set in B053. If the
DC bus voltage rises up to the set value of B052, the inverter stops deceleration to
avoid OV tripping.
e During this interval, the DC bus voltage decreases again due to lack of input power.
f When the DC bus voltage comes down to the set value of B051, the inverter starts
deceleration according to the set value of B053 again. This process will be repeated
as needed until the motor is brought to a stop.
N
OTE: If the DC bus voltage comes down to the UV level during this operation, the
inverter trips with under-voltage and motor will free-run (coast) to a stop.
NOTE: If the set value of B052<B051, then the inverter internally swaps the B052 and
B051 values. However the displayed values are not changed.
NOTE: This function cannot be interrupted until it is completed. So if the power is
restored during this operation, wait until the operation is done (motor stops) and then
give the run command.
Power
DC bus voltage
Output frequency
b052
b051
Under-voltage
level
OFF
b054
b053
b053
b053
c d e f
338
Configuring Drive
Parameters
3 38
&RQ¿JXULQJ'ULYH
Parameters