



















Remote Control Up and Down Functions
The [UP][DWN] terminal functions can adjust the output frequency for remote control
while the motor is running. The acceleration time and deceleration time of this function
is same as normal operation ACC1 and DEC1 (2ACC1,2DEC1). The input terminals
operate according to these principles:
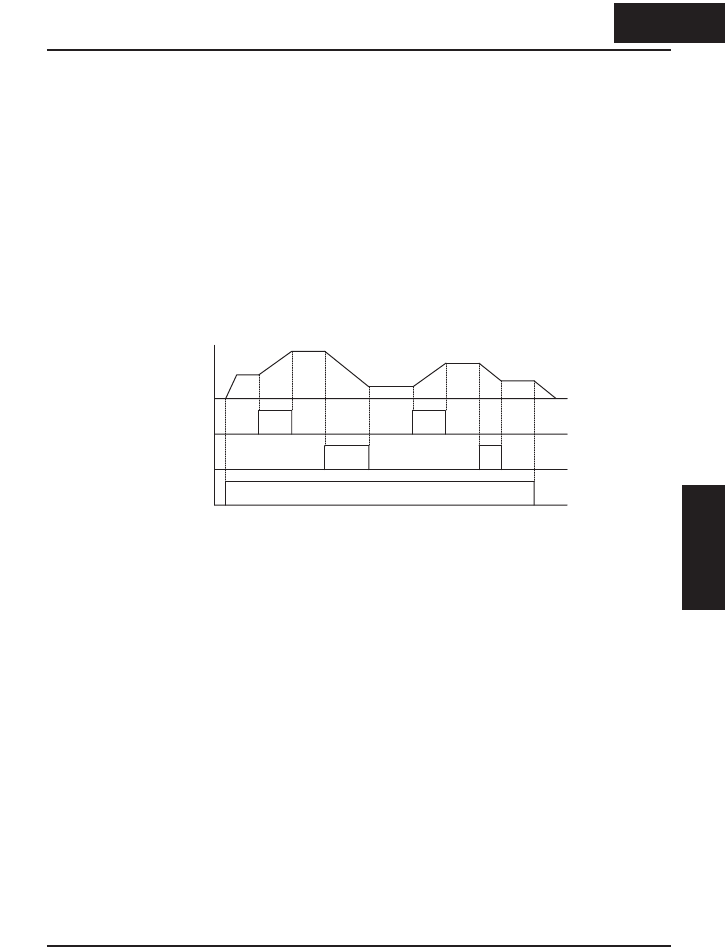
x Acceleration - When the [UP] contact is turned ON, the output frequency accelerates
from the current value. When it is turned OFF, the output frequency maintains its
current value at that moment.
x Deceleration - When the [DWN] contact is turned ON, the output frequency
decelerates from the current value. When it is turned OFF, the output frequency
maintains its current value at that moment.
In the graph below, the [UP] and [DWN] terminals activate while the Run command
remains ON. The output frequency responds to the [UP] and [DWN] commands.
[UP]
1
0
Motor speed
[DWN]
1
0
t
[FW,RV]
1
0
427
Operations and
Monitoring
4 27
Operations and
Monitoring