



















6-4 Keypad Programming MN1854
Example: (Distance to Change)
The DC command can only be used when the motor is moving at constant speed (no
acceleration of deceleration). Issuing a DC command before a previous DC command has
finished executing is invalid and can cause unpredictable results. (For example, “AC1 VE
DA20 DC1.75 VE7.5 GO” is incorrect use of the DC command). The initial acceleration
ramp requires 2.5 units to reach velocity S= 0.5V
t
, the DC1.75 is an invalid trigger position
and is ignored. The following formula ensures the use of valid DC trigger positions:
DC
n
* DC
n*1
*
(|
V
n*1
* V
n
|)
t
2
w 0
Where:
n is the commanded DC distance (n=19 in this example)
n–1 is the previous commanded DC distance (for example 10)
V is the velocity
t is the acceleration time
(The first commanded DC move in a profile, n–1 is the beginning
of the move).
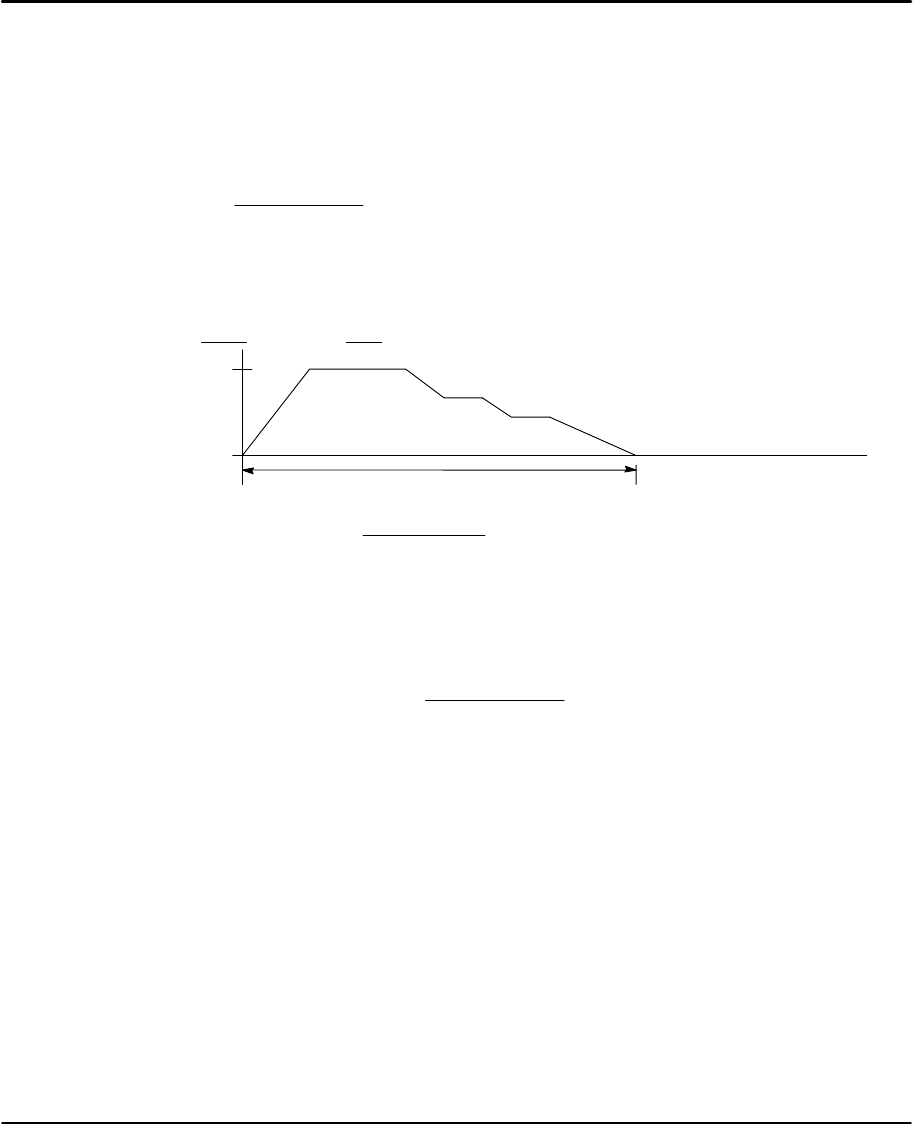
Examples of DC move profiles:, AC = seconds, VE=ips.
AC1.6 DE0.8 VE5 DA20 DC10
AC2.5 VE3 DC? VE2.5 GO
5
10
?
19
20 Units
To calculate DC
n
(or DC? in the example)
DC
n
+
(
|
5 * 3
|
) (2.5)
2
) 10 + 12.5
“?” must be ≥ 12.5 distance units. Also, the DC trigger position and the DC? VE2.5
segment must be verified or determined before the beginning of the move declaration. If “?”
is chosen to be 13.35 (a valid trigger position), use the beginning of the decel ramp as DC
n
in the DC formula. A decel ramp from 2.5 to 0 requires 1 distance unit in 0.8 seconds (S=
0.5V
t
).
19 * 13.35 *
(
|
0 * 2.5
|
) (0.8)
2
+ 5.65
Since the result is positive, the DC13.35 VE2.5 is a valid segment.
AC.05 DE.05 VE10 DA4 DC1 OT100 DC2 OT010 DC3 OT001 GO
{While moving to an absolute position of 4 units, turn on output 1 at 1 unit, output 2
at 2 units and output 3 at 3 units}
AC.05 DE.09 VE30 DA6 DC3 VE15 GO
{Move to absolute position 6 units with a starting speed of 30. At 3 units, reduce
speed to 15 (change–on–fly) and complete move}
AC1 DE.5 VE20 DI–8 DC1 OT10 DC3 OT01 GO
{Move an incremental distance of negative 8 units. After 1 unit, turn on output 1,
and after 3 additional units of motion, turn off output 1 and turn on output 2}
AC.05 DE.15 VE50 DI15 DC5 VE10 DC5 VE5 GO
{At a starting speed of 50, begin moving an incremental distance of 15 units. After
5 units, ramp down to 10 speed. After an additional 5 distance units, ramp down to
5 speed and continue until the final position is reached}