



















Keypad Programming 6-11MN1854
Value: N/A
Units: N/A
Range: i=1–16
GO executes a move profile defined by some combination of AC, VE, DE, DI, DA, DC, or MC commands.
Actual motion of a new profile will occur after a short calculation of the motion trajectory. GOn pre–calculates
the move and waits for Input number “n” to activate before executing. This variation is sometimes useful for
applications needing very short, repeatable move calculation delays. It is more often used simply to shorten
code, since it functions like the combination of Wait on Input and Go (WTn GO) yet it pre–calculates the
move. Like other commands using I/O, GOn does not restrict you from using an input even if it has been
configured for some predefined function.
Examples:
AC.05 DE.05 VE50 DI5 GO
GO initiates calculation of a move profile using buffered parameters (.05 unit
Accel and Decel Ramp, speed 50, 5 unit incremental move) and executes it.
AC.05 DE.05 VE50 DI5 GO
2 When input 2 is activated, immediate execution of the motion calculation
already in the buffer is performed.
GO
Go (Start a Move) syntax – GO or GOi
Value: N/A
Units: N/A
Range: N/A
GP
Go Point(Start a Move) syntax – GP or GPn
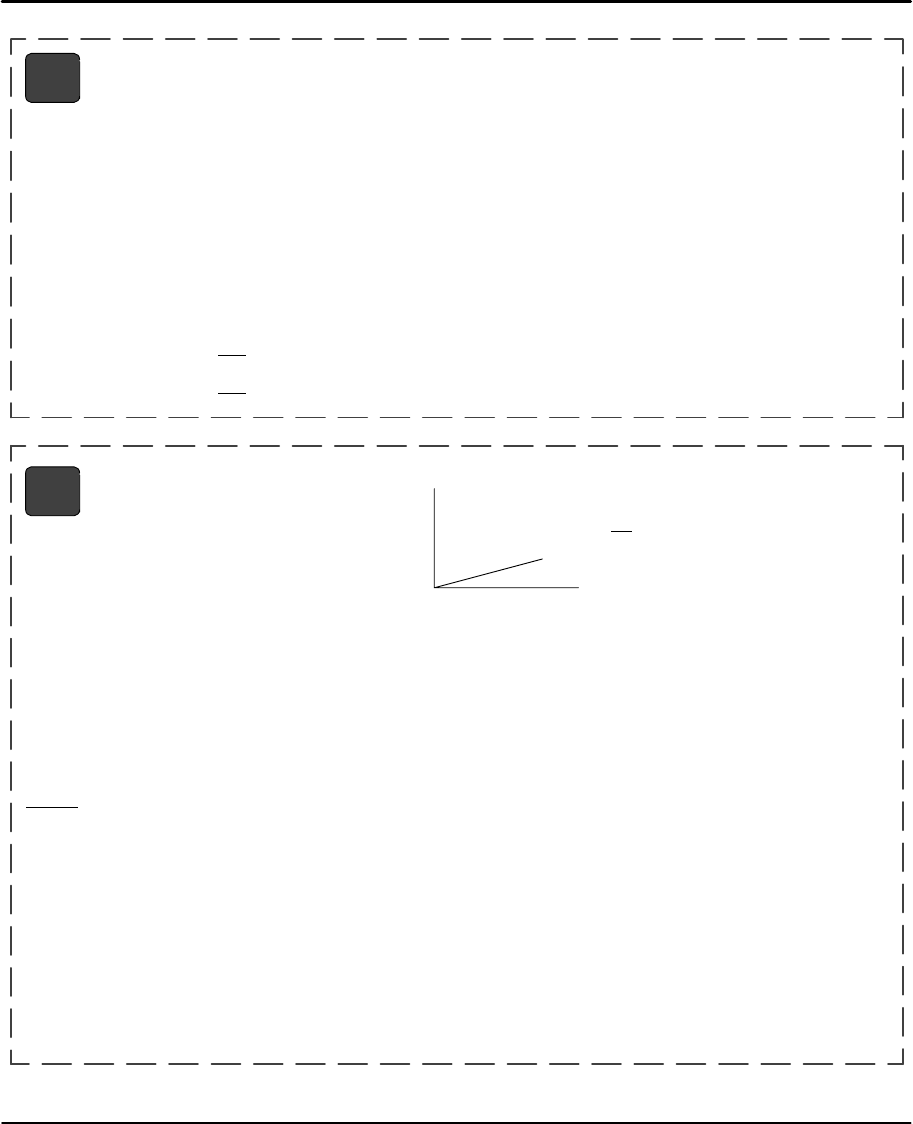
The GP command allows a LinStep+ two axis to execute a linear interpolated move. An example of the GP
move is shown. The path velocity, acceleration and deceleration are specified by the parameters
traditionally defined for one axis move. These parameters are defined once and each GP move there after
will use these values until new values are entered. The end point of the move is specified by a two axis DA
or DI command to the appropriate X and Y coordinates.
In the example, the path velocity is 2 user units/sec, path acceleration is .1 sec and the X,Y position is (4,2).
The GPn command specifies a discrete input must be active before executing the move. Although both
axes move during a GP move, all GP parameters refer to the path movement rather than the individual axis
movements.
Notes:
GP will work with any velocity or acceleration unit.
The largest GP move is restricted to X2+Y2 <= (231–1)
2
in units of steps.
For example, the longest simultaneous X,Y point move is:
Steps: DA1518500249,1518500249
If resolution is 8000: DA189 812.5311,189 812.5311
If resolution is 25000: DA60 740.0099,60 740.0099
Commanding moves larger than X2+Y2 <= (231–1)
2
will produce unpredictable results.
The DC command does not recognize an interpolated move as a ’single’ move and will treat the axes
independently. Therefore, using a DC during a GP move will cause unpredictable results unless the user
has calculated the necessary values to preserve the vector move.
(4,2)
X
Y
Example:
VE2 AC.1 DA4,2 GP