


















6-139
Safety
6Safety
6.1.7 Examples of safety measures
Two emergency-stop input circuits are prepared on the user wiring terminal block of the controller. Create a cir-
cuit as shown below for safety measures. In addition, the figure shows the normal state which is not in the emer-
gency stop state.
[Caution] Since we have omitted the information in part because of explanation, there is the section different
from the product. Also refer to Page 149, "(3) External emergency stop connection [supplementary
explanation]".
[Note] ・ In the emergency-stop related wiring by the customer, if the coil (is not the contact points) of the relay
prepared by the customer is connected to the controller, please be sure to implement the measure
against the noise by the customer in the coil section. And, please also take the lifetime of noise suppres
-
sion parts into consideration.
・ Electric specification of the emergency-stop-related output terminal: 100mA/24V or less
・ In the customer's system, do not ground the + side of 24V power supply prepared by customer for con
-
nect to the controller. (related with emergency stop and parallel input/output) If it connects with the
controller under the condition that the + side is grounded, it will lead to failure of controller.
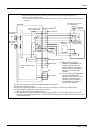
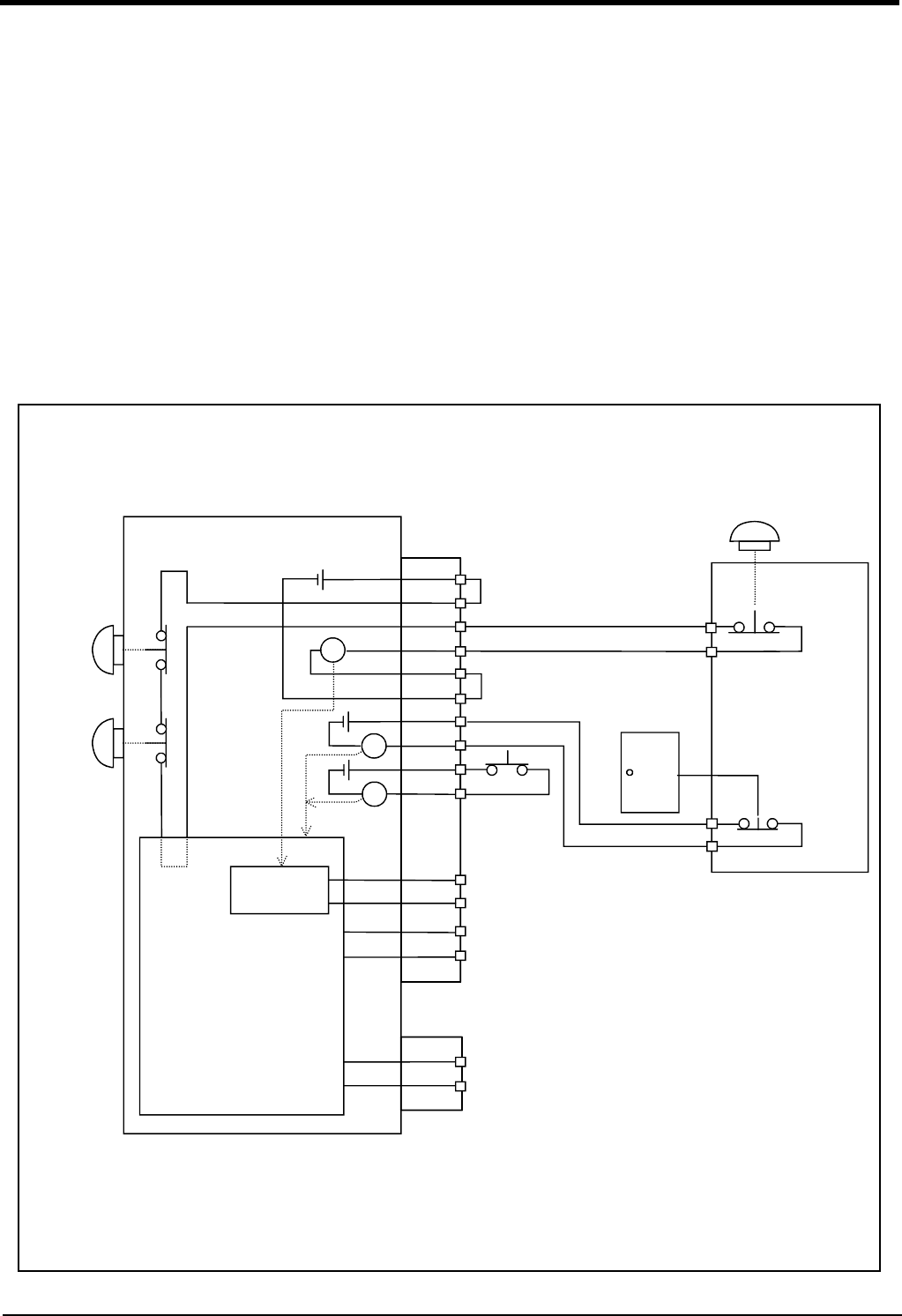
(1) CR750 controller
Fig.6-1 : Example of safety measures (CR750 wiring example 1)
<Wiring example 1>: Connect the emergency stop switch of peripheral equipment to the controller.
The power supply for emergency stop input uses the power supply in the controller.
<Operation of the emergency stop>
If the emergency stop switch of peripheral equipment is pushed, the robot will also be in the emergency
stop state.
非常停止スイッチ
(2接点タイプ)
周辺装置
安全柵のドア
1
CNUSR11/CNUSR12
CNUSR2
内部非常停止回路
非常停止出力
モード出力
OP非常停止
ボタン
RA
RA
RA
}
ドアスイッチ入力
イネーブリング
デバイス
2
3
4
5
6
7
8
9
10
13
14
11
12
16/17
41/42
エラー出力
}
短絡
短絡
}
TB非常停止
ボタン
内部電源 24V
安全リレー
*1) Each of the connectors,
CNUSR11 and CNUSR12, are
assigned with the same pin
number, creating two systems for
each terminal. It is absolutely
necessary to connect the two
systems.
*2) You can see in the diagram that
connector CNUSR2 has two
terminals and two systems (16/
17 indicates two terminals at pin
number 16 and pin number 17).
It is absolutely necessary to
connect the two systems.
Controller
*3) The T/B emergency stop button connected with the controller.
*4) Emergency stop input relay.
*5)
Refer to the Standard specification manual or Special specification manualfor the enabling device.
*6) The emergency stop button of the robot controller. (Only specification with the operation panel.)
*7) The emergency stop input detection relay is used the controller’s internal safety relay control. If the
emergency stop input detection relay is switched OFF, emergency stop is detected and the safety relay is also
switched OFF.
Power supply in the
robot controller 24V
OP Emergency
stop button
TB Emergency
stop button
Not connected
Door switch input
Enabling
device
Mode output
Error output
Emergency stop output
Safety relay
Internal emergency stop
circuit
Emergency stop switch
(2- contact type)
Peripheral
equipment
Safety
fence door
*1)
*2)
*3)
*6)
*4)
*5)
*7)
Short circuit
(Short-circuited)