


















2-17
2 Robot arm
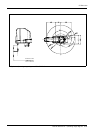
(2) Relationship Between Height of Shaft (J3 Axis) and Acceleration/Deceleration Speed
A function to optimize the acceleration/deceleration speed according to the height of the shaft (Refer to Fig. 2-3,
Fig. 2-4) will be activated. This function is invalid if the shaft (axis J3) operates at a position above P3 in Fig. 2-3.
Acceleration/deceleration is compensated for at a position below P3 in Fig. 2-3 if the position of the center of
gravity of the load is located at the front edge of the shaft.
Fig.2-3 : Area in which acceleration/deceleration speed is compensated
Table 2-4 : Area in which acceleration/deceleration speed is compensated
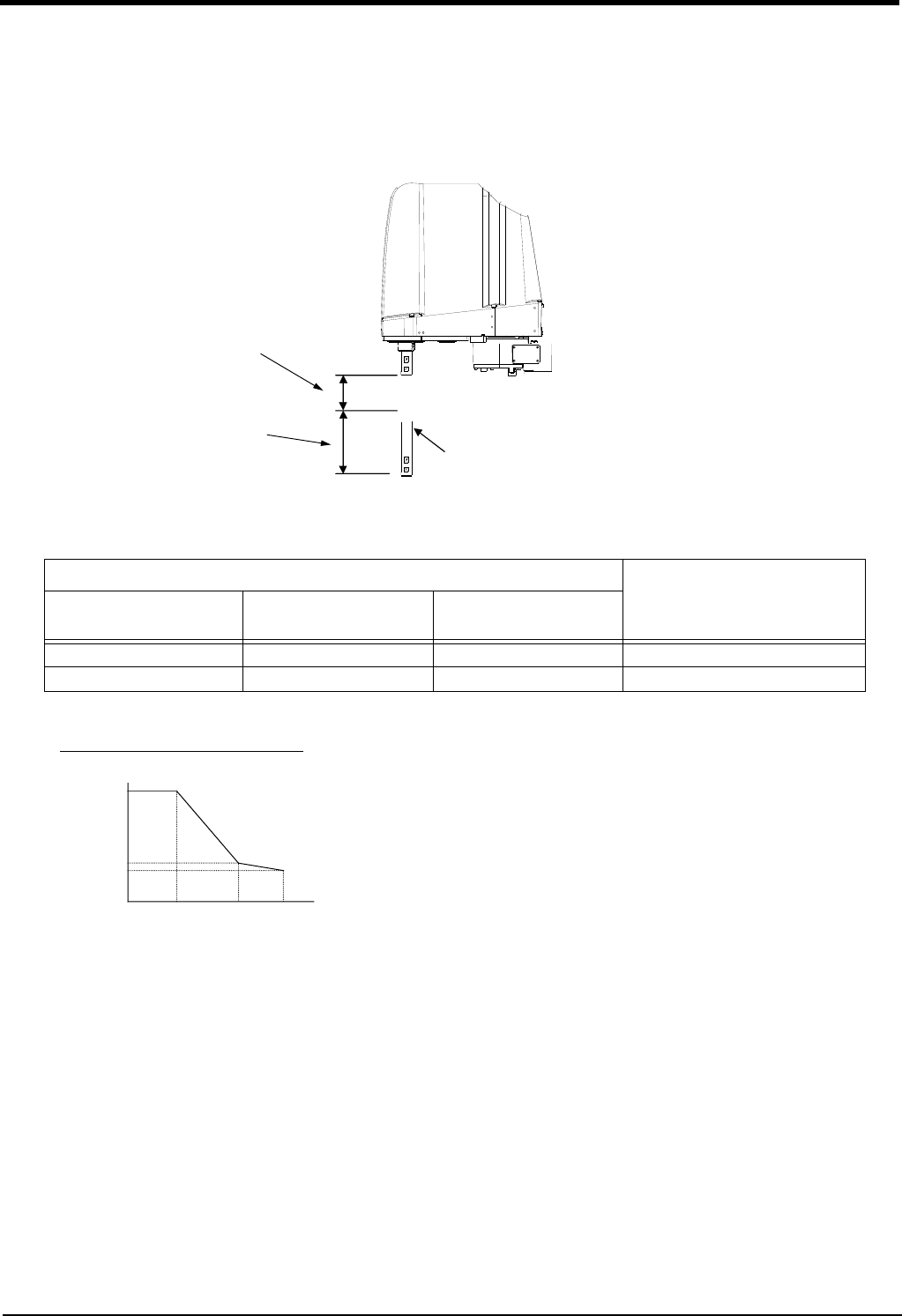
Fig.2-4 : Automatic compensation of acceleration/deceleration speed
J3 axis stroke (mm)
Compensation area
(P2 to P3)
Stroke length
P1
(Upper end)
P2
(Lower end)
120 340 220 220 ~ 310
150 370 220 220 ~ 310
P3
→
→
シャフト(J3軸)
速度、加減速度を
補正しない領域
速度、加減速度を
補正する領域
P1
P2
Shaft (J3 axis)
Area in which speed and
acceleration/deceleration
speed are not compensated
Area in which speed and
acceleration/deceleration
speed are compensated
100
36
0
370
310
220
シャフト位置(mm)
(%)
250
24
J3 axis (Z) stroke 120mm/150mm
Acceleration/decelera-
tion speed ratio(%)
Shaft position (mm)
(Standard Acceleration/deceleration speed)