



















2-59
Options
2 Robot arm
(8) External Wiring/Piping box
■ Order type: 1F-UT-BOX
■ Outline
This is a very useful option when removing the air hoses and signal lines from the
rear of the No. 2 arm, and pulling hand wiring and piping out to the robot’s exterior.
The joint for connects to the external hose is prepared, and the holes which fixes the
signal cable to pull out with cable clamp are prepared. Optional hand output cables
and hand input cables can be fixed here.
This option can also be used on the clean specifications.
■ Configuration
Table 2-29 : Configuration equipment
■ Specification
Table 2-30 : Specification
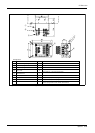
An outside dimension and a component are shown in Fig. 2-36.
Part name Type Qty. Mass (Kg)
Note1)
Note1) Mass indicates one set.
Remarks
External Wiring/Piping box 1F-UT-BOX 1 0.5 Attachments:
・ Eight Air hoses (φ4, connect to solenoid valve)
・ Installation screw M4 x 12: 4 screws
(Conical spring washer, Plain washer)
・ Simple spanner for resin nuts
Item Specification Remarks
Outline 106(W) x 73.6(D) x 72(H) The coupling is included.
The hole for wiring drawers φ21 x 4 places Fix the cable by cable clamp etc.
Coupling For φ4 air hose x 8pcs Installed previously
For φ6 air hose x 2pcs
Pull out
Wiring/Piping