


















2 Robot arm
Options
2-60
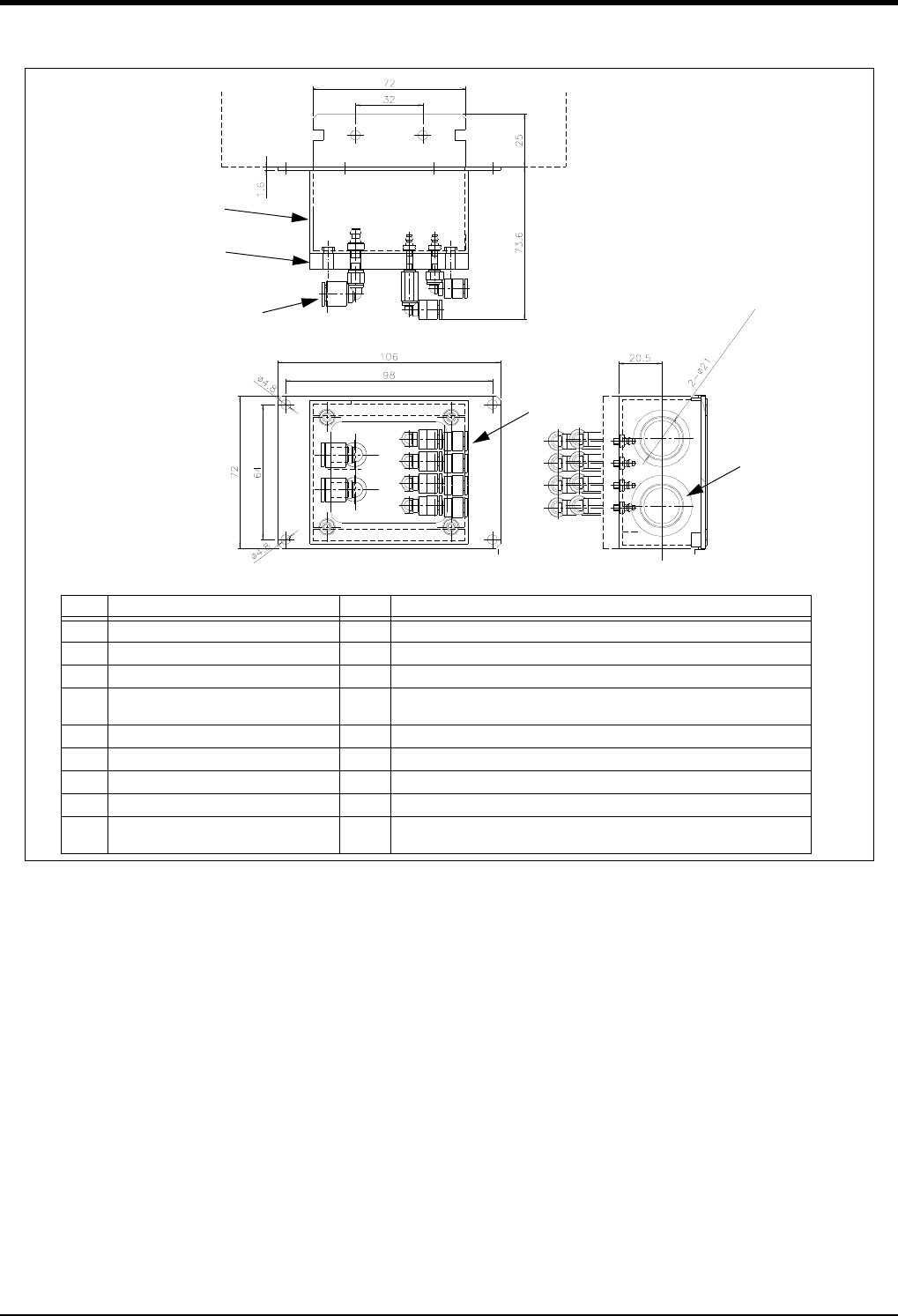
Fig.2-36 : Outline dimension and configurations
Configuration
Part name Qty. Specification
① External Wiring/Piping box housing 1
② Quick coupling 8 φ4 (Elbow)
③ Quick coupling 2 φ6 (Elbow)
④ φ21 hole 4
The grommet is attached to each hole.
(Two holes are in the right and the left.)
⑤ Manifold block 1
- Simple spanner for resin nuts 1
- Plug 8 Stopper for φ4 quick coupling
- Plug 2 Stopper for φ6 quick coupling
- Installation screw 4
Installation screws M4 x 12
Conical spring washer, Plane washer (Attachment)
①
②
④
③
⑤
Inside the robot
(
Th
i
s
h
o
l
e
i
s
a
l
s
o
i
n
t
h
e
o
t
h
e
r
s
i
d
e
)