



















2-51
Options
2 Robot arm
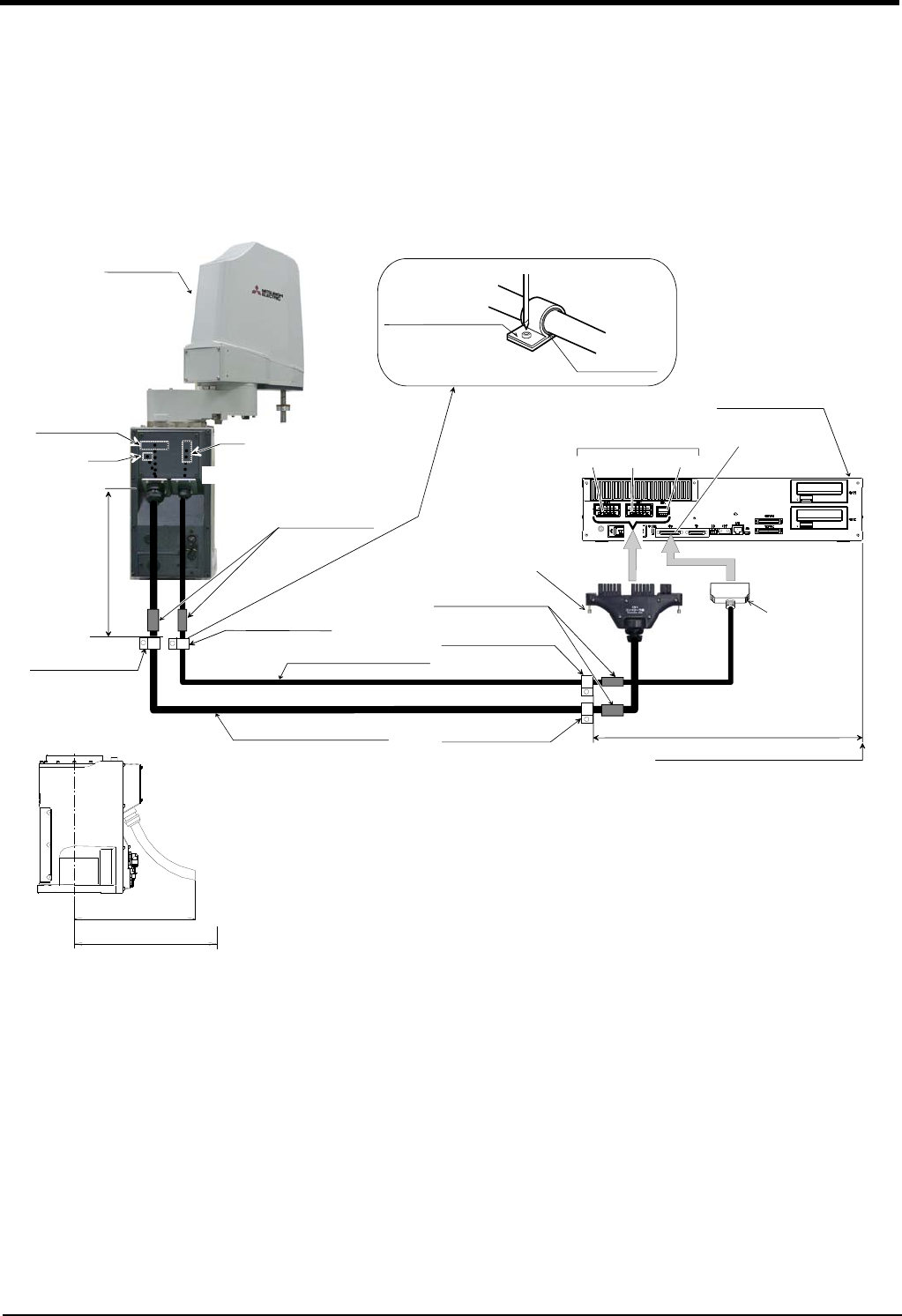
Fig.2-30 : Fixing the flexible cable (CR751)
シリコンゴム
ナイロンクランプ
モータ電源ケーブル
モータ信号ケーブル
ロボット本体
CN2
ナイロンクランプ
NK-14N
NK-18N
ナイロンクランプ
NK-18N
NK-14N
ナイロンクランプ
300~500mm
300~
500mm
ナイロンクランプ
AMP1・AMP2
BRK
コントローラ
CN2
CN1
モータ信号(CN2)モータ電源(CN1)
AMP1 AMP2 BRK
コントローラコネクタ面
ネジ
(固定用 2本)
ネジ
(固定用 2本)
熱収縮チューブ
熱収縮チューブ
*1) Connect the robot arm side connector to the connector which is inside the
CONBOX cover.
*2) The flexible cable area is the area between the heat shrink tubes on the
robot and the controller sides.
*1)
Controller
Nylon clamp
Silicon rubber
Robot arm
Nylon clamp
Motor signal cable
Motor power cable
Nylon clamp
Nylon clamp
<CR751 controller>
Two fixing screws
Two fixing
screws
Controller connector face
Motor power (CN1) Motor signal (CN2)
Nylon clamp
(1) Connect the connector to the robot arm.
(2) For protection of wires from external stress, refer to Fig. 2-30. Wrap the cable with the supplied silicon
rubber and fix the cable with nylon clamps in the area between the heat shrink tubes on the robot and the
controller sides (flexible cable area).
Heat shrink tube
*2)
Heat shrink tube
*2)
最小200
250
The cable should bend and the size should be 200mm or more.
And a connection space for a machine cable needs 250mm or more.
Min. 200