


















2-19
2 Robot arm
(4) Time to reach the position repeatability
When using this robot, the time to reach the position repeatability may be prolonged due to the effect of residual
vibration at the time of stopping. If this happens, take the following measures:
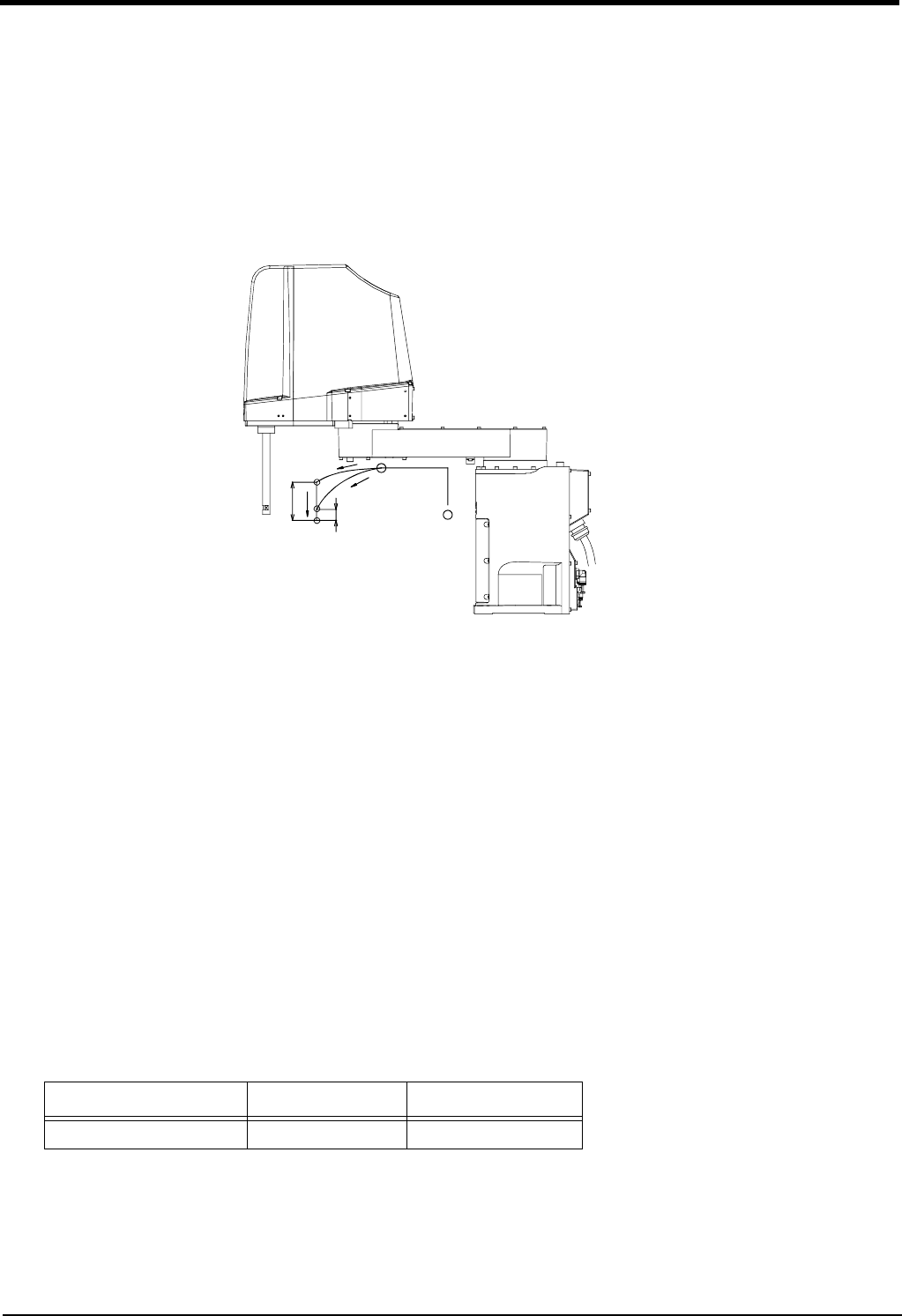
1) Change the operation position of the Z axis to the location near the top as much as possible.
2) Increase the operation speed prior to stopping.
3) When positioning the work near the bottom edge of the Z axis, if no effectiveness is achieved in step "2)"
above, perform operation ① (robot path: O → A → C). In the case of operation ② (robot path: O → B →
C), residual vibration may occur. (Refer to Fig. 2-7.)
Fig.2-7 : Recommended path when positioning at the bottom edge of the Z axis
2.2.6 Collision detection
This series have the "collision detection function" which detects the abnormalities by the collision of the robot
arm, and the initial setting has set this function as the enable to suppress damage to the minimum.
Although the enable/disable of this function can be changed by parameter: COL and command: ColChk, you
should use in valid condition of this function for protection of the robot and of the peripheral equipment.
The abnormalities are detected by the robot's kinetics model, presuming torque necessary for movement at any
time. Therefore, the setting parameter (HNDDAT*, WRKDAT*) of the hand and the work piece conditions should
be right. And, it may be detected as the collision in movement as speed and motor torque are changed rapidly. (for
example, the movement near the place of the origin by linear interpolation, the reversal movement, the cold con-
dition, the operation after long term stoppage)
In such a case, by adjusting the value of the setting parameter (COLLVL, COLLVLJG) of the collision detection
level according to actual use environment, the sensitivity of collision detection can be optimized and the damage
risk can be reduced further. And, in the operation after the low temperature or long term stoppage, please operate
by accustoming at low speed (warm-up), or use the warm-up operation mode.
Refer to the separate instruction manual "Detailed explanations of functions and operations" for details of related
parameter.
Table 2-5 : Factory-shipments condition
JOG operation Automatic
RH-3FH series Valid Invalid
A
100mm
以上
B
②
①
O
More than 100mm