



















2-9
Standard specifications
2Robot arm
2 Robot arm
2.1 Standard specifications
2.1.1 Basic specifications
(1) Standard specification
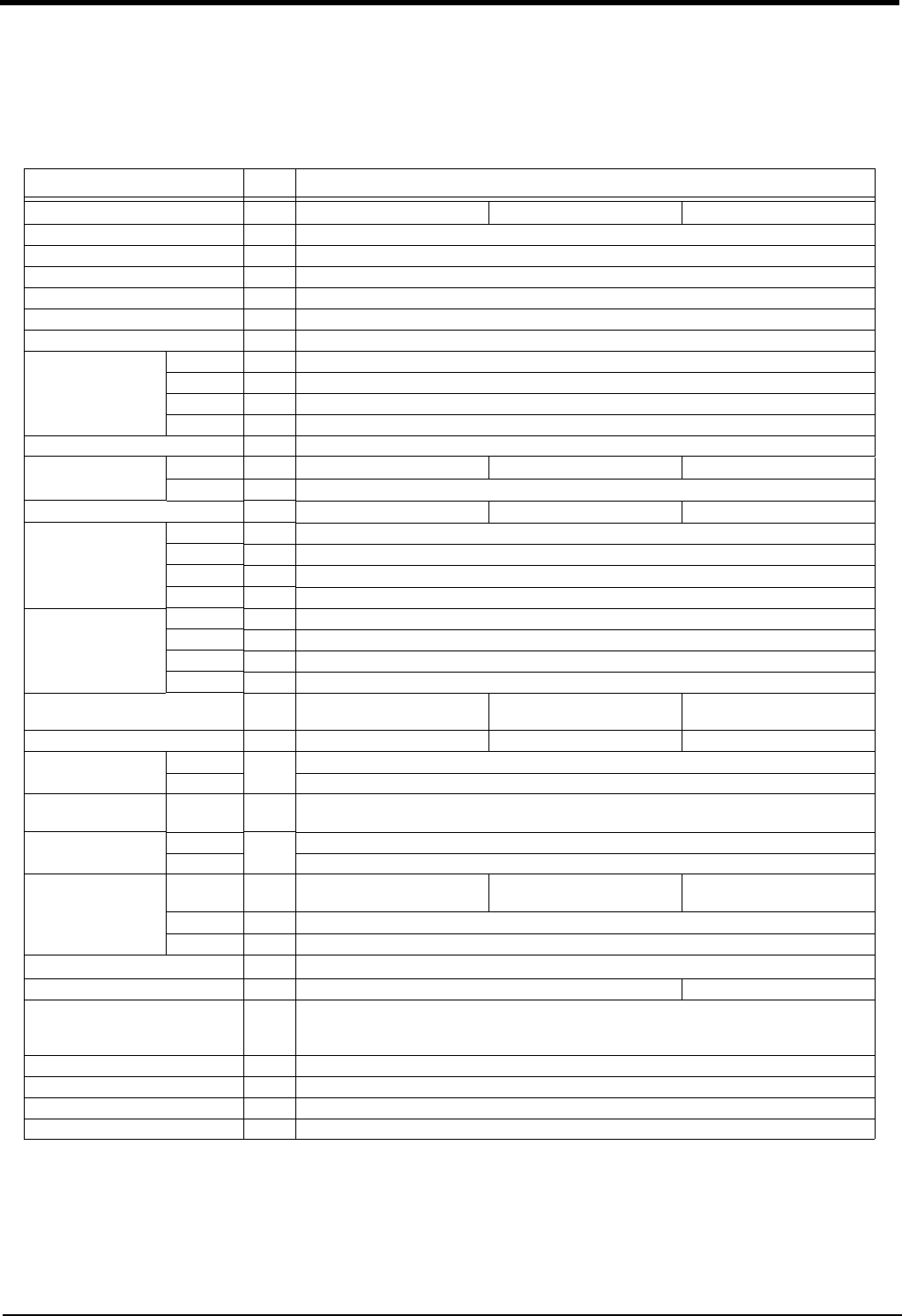
Table 2-1 : Standard specifications of robot arm
Item Unit
Specifications
Type
RH-3FH3515 RH-3FH4515 RH-3FH5515
Environment Standard specification
Installation posture On floor
Degree of freedom 4
Structure Horizontal, multiple-joint type
Drive system AC servo motor
Position detection method Absolute encoder
Motor capacity J1 W 200
J2 W 100
J3 (Z) W 100
J4 (θaxis) W 50
Brake J1, J2, J4: no brake, J3: with brake
Arm length № 1 arm
mm
125
225 325
№2 arm
mm
225
Max.reach radius( № 1+ № 2)
mm
350
450 550
Operating range J1 deg ±170
J2 deg ±145
J3 (Z)
mm
150
J4 (θaxis) deg ±360
Speed of motion
Note1)
Note1) The maximum speed is the value which applied MvTune2 (high-speed movement mode).
J1 deg/s 400
J2 deg/s 720
J3 (Z) mm/s 1,100
J4 (θaxis) deg/s 3,000
Maximum horizontal composite speed
Note2)
Note2) At the maximum speed on the X-Y flat surface in the robot's control point, it is obtained with each speed of J1, J2,
and J4. The control point is the position offset by the rated inertia from the flange.
mm/s
6,800 7,500 8,300
Cycle time
Note3)
sec 0.41 0.46 0.51
Load
Rating
kg
(N)
1
Maximum 3
Z axis pressing force
Note4)
Maximum N 82
Allowable inertia Rating
kg ・ m
2
0.005
Maximum 0.06
Pose repeatability
Note5)
X-Y
direction
mm
±0.010 ±0.010 ±0.012
J3 (Z)
mm
±0.010
J4 (θaxis) deg ±0.004
Ambient temperature
Note6)
℃0 to 40
Mass
k
29
32
Tool wiring ・ Input 8 points/Output 8 points, (total 20 cores)
・ Dedicated signal cable for multifunctional hand (Two cores + Power cable two cores)
・ Ethernet cable one cable (100BASE-TX, eight cores)
Note7)
Tool pneumatic pipes Primary: φ6 x two hoses, Secondary: φ4 x eight hoses
Note8)
Supply pressure MPa 0.5±10%
Protection specification
Note9)
IP20
Painting color Light gray (Equivalent to Munsell: 0.6B7.6/0.2)