



















E6581301
F-17
6
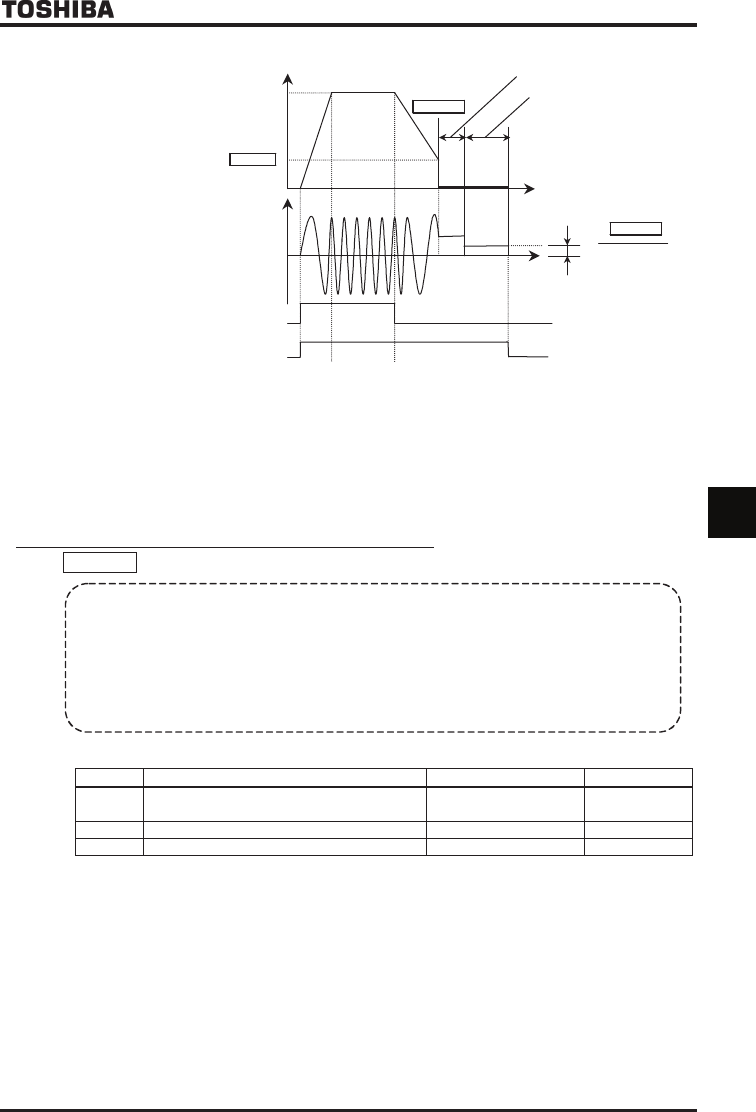
Time [s]
DC braking start frequency
H
Output frequency [Hz]
LED display
Operation signal (F-CC)
ON
OFF
Output current [A]
0
0
Set frequency
Operation standby signal (ST-CC)
(SW1 set to sink logic)
ON
OFF
H
2
FD
is displayed.
FDQP
is displayed.
H
Note 1: If the motor shaft fixing control parameter H is set at (enabled) when the output frequency is below
the DC braking start frequency H and terminals ST-CC are closed (ON), the DC braking function is
activated and the motor shaft fixing control continues regardless of the setting of the DC braking time
parameter H.
Note 2: If a power failure occurs during motor shaft fixing control and the motor starts to a coast, motor shaft fixing
control will be canceled. Also, if the inverter trips during motor shaft fixing control and is restored to working
order by the retry function, motor shaft fixing control will be canceled.
6.8.3 Function of issuing a 0Hz command during a halt
H
HH
H
: 0Hz command output selection
• Function
This function controls the motor in the zero-speed state at the time of stop. If this function is set up, the
0Hz command will be put out instead of DC braking at the time of a stop,and a motor will be controlled in
the setting time stop state. The monitor display serves as
FD
during this control operation. This function
operates only at the time of vector control with a sensor (
RV
=
,
).
Refer to DC braking (Section 6.8.1) for conditions of operation. The position of DC braking is served as an
operation which sets the operation frequency command to 0Hz.
[Parameter setting]
Title
Function
Adjustment range
Default setting
H
0Hz command output selection
: Standard (DC braking)
: 0Hz command
H
DC braking starting frequency
~ Hz
H
DC braking time
~ sec.
Note 1: This function doesn't operate when H=.
Note 2: If this function is set up, motor shaft fixing control H cannot be used.
Note 3: This function doesn't operate at the time of a torque control.
Note 4: This function doesn't operate except RV=, of the vector control mode with a sensor. In order to use this
function, the option board for PG feedback is required. When expect vector control with a sensor RV=, ,
this function operate as DC braking mode (It is the same as H= setting).
Note 5: Since the reference frequency that will suspend the motor abruptly from the state of high rotation if (H)
is set up highly, please be careful. A trip may occur according to load conditions.
Note 6: This parameter has a function similar to the DC braking function, which is activated by a command from the
terminal board or an external control device (input terminal function or , or command from external
control device). To the DC braking function which will be activated if H (jog run stop pattern) is set to
(DC braking), and to the DC braking function which will be activated if H (emergency stop pattern) is
set to (DC braking), but it issues 0Hz commands instead of DC braking commands.