















E6581301
11
K-10
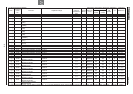
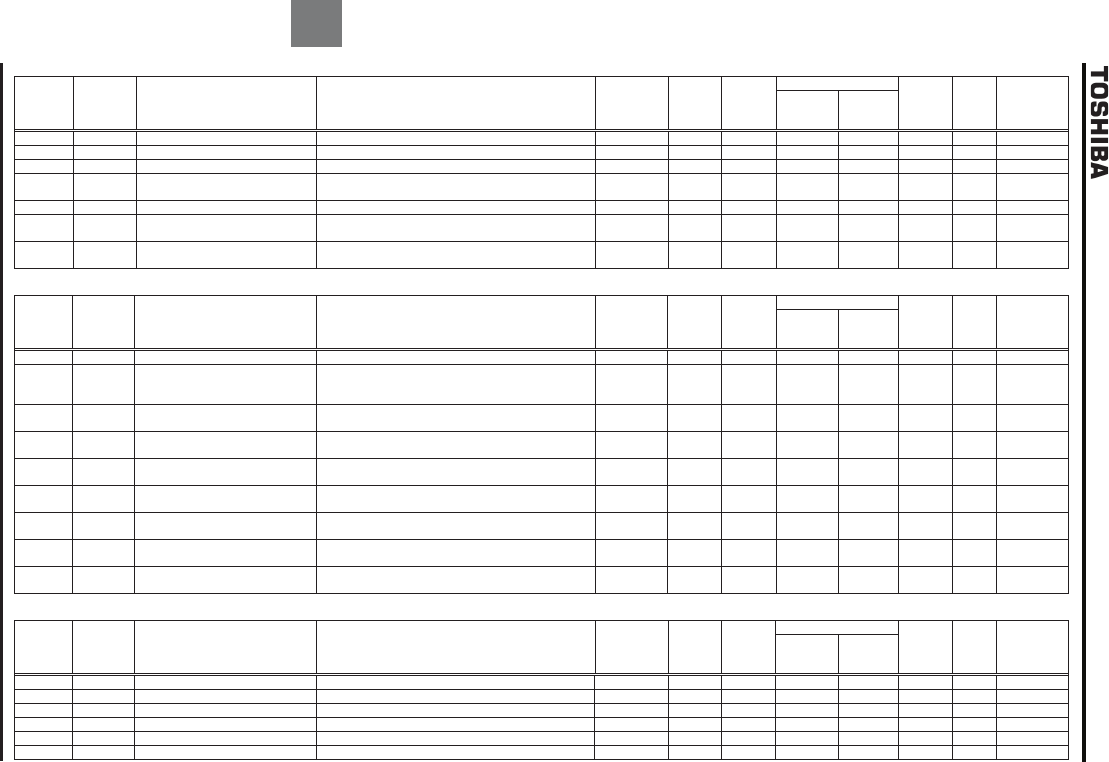
[8] DC braking Sensorless vector/vector with sensor (Ɣ:Effective, -:Ineffective)
Title
Communi
cation
No.
Function Adjustment range
Minimum
setting unit
(Panel/Communi
cation)
Default
setting
Write during
running
Vector control
PM
control
V/f Reference
Speed
control
Torque
control
H
0250
DC braking start frequency
0.0~120.0Hz
0.1/0.01
0.0
Enabled
Ɣ
/
Ɣ
-
Ɣ
Ɣ
6. 8. 1
H
0251
DC braking current
0~100%
1/1
5
0
Enabled
Ɣ
/
Ɣ
-
Ɣ
Ɣ
6. 8. 1
H
0252
DC braking time
0.0~20.0 sec.
0.1/0.1
1.0
Enabled
Ɣ
/
Ɣ
-
Ɣ
Ɣ
6. 8. 1
H
0253
Forward/reverse DC braking
priority control
0:Disabled, 1:Enabled 1/1 0 Enabled Ɣ/Ɣ - Ɣ Ɣ 6. 8. 1
H
0254
Motor shaft fixing control
0:
Disabled, 1:Enabled
1/1
0
Enabled
Ɣ
/
Ɣ
-
Ɣ
Ɣ
6. 8. 2
H
0255 0Hz command output selection
0:Default (DC braking)
1:0Hz command
1/1 0 Enabled -/Ɣ - - - 6. 8. 3
H
0256
Time limit for lower
-
limit
frequency operation
0.0:Disabled
0.1~600.0 sec.
0.1/0.1 0.0 Enabled Ɣ/Ɣ Ɣ/Ɣ Ɣ Ɣ 6. 9
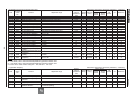
[9] Jogging operation Sensorless vector/vector with sensor (Ɣ:Effective, -:Ineffective)
Title
Communi
cation
No.
Function Adjustment range
Minimum
setting unit
(Panel/Communi
cation)
Default
setting
Write during
running
Vector
control
PM
control
V/f Reference
Speed
control
Torque
control
H
0260
Jog run frequency
H
~20.0Hz
0.1/0.01
5.0
Enabled
Ɣ
/
Ɣ
-
Ɣ
Ɣ
6. 10
H
0261 Jog run stop pattern
0:Deceleration stop
1:Coast stop
2:DC braking stop
1/1 0 Disabled Ɣ/Ɣ - Ɣ Ɣ 6. 10
H
0262 Operation panel jog run mode
0:Disabled
1:Operation panel jog run mode enabled
1/1 0 Enabled Ɣ/Ɣ - Ɣ Ɣ 6. 10
H
0264
Input from external contacts
-
UP response time
0.0~10.0 sec. 0.1/0.1 0.1 Enabled Ɣ/Ɣ - Ɣ Ɣ 6. 11
H
0265
Input
from external contacts
-
UP frequency step
0.0~HJ Hz 0.1/0.01 0.1 Enabled Ɣ/Ɣ - Ɣ Ɣ 6. 11
H
0266
Input from external contacts
-
DOWN response time
0.0~10.0 sec. 0.1/0.1 0.1 Enabled Ɣ/Ɣ - Ɣ Ɣ 6. 11
H
0267
Input from external contacts
-
DOWN frequenc
y step
0.0~HJ Hz 0.1/0.01 0.1 Enabled Ɣ/Ɣ - Ɣ Ɣ 6. 11
H
0268
Initial motor operated pot mop
setting
NN~WN Hz 0.1/0.01 0.0 Enabled Ɣ/Ɣ - Ɣ Ɣ 6. 11
H
0269
Initial motor operated pot mop
setting rewriting
0:Not
changed
1:
Setting of
H
changed when p
ower is turned off
1/1 1 Enabled Ɣ/Ɣ - Ɣ Ɣ 6. 11
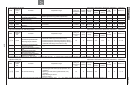
[10] Jump frequency Sensorless vector/vector with sensor (Ɣ:Effective, -:Ineffective)
Title
Communi
cation
No.
Function Adjustment range
Minimum
setting unit
(Panel/Communi
cation)
Default
setting
Write du
ring
running
Vector control
PM
control
V/f Reference
Speed
control
Torque
control
H
0270
Jump frequency 1
0.0~
HJ
Hz
0.1/0.01
0.0
Enabled
Ɣ/Ɣ
-
Ɣ
Ɣ
6. 12
H
0271
Jump
ing
width
1
0.0~30.0Hz
0.1/0.01
0.0
Enabled
Ɣ/Ɣ
-
Ɣ
Ɣ
6. 12
H
0272
Ju
mp frequency 2
0.0~
HJ
Hz
0.1/0.01
0.0
Enabled
Ɣ/Ɣ
-
Ɣ
Ɣ
6. 12
H
0273
Jump
ing
width
2
0.0~30.0Hz
0.1/0.01
0.0
Enabled
Ɣ/Ɣ
-
Ɣ
Ɣ
6. 12
H
0274
Jump frequency 3
0.0~
HJ
Hz
0.1/0.01
0.0
Enabled
Ɣ/Ɣ
-
Ɣ
Ɣ
6. 12
H
0275
Jump
ing
width
3
0.0~30.0Hz
0.1/0.
01
0.0
Enabled
Ɣ/Ɣ
-
Ɣ
Ɣ
6. 12