



















SJ300 Inverter
Configuring Drive
Parameters
3–55
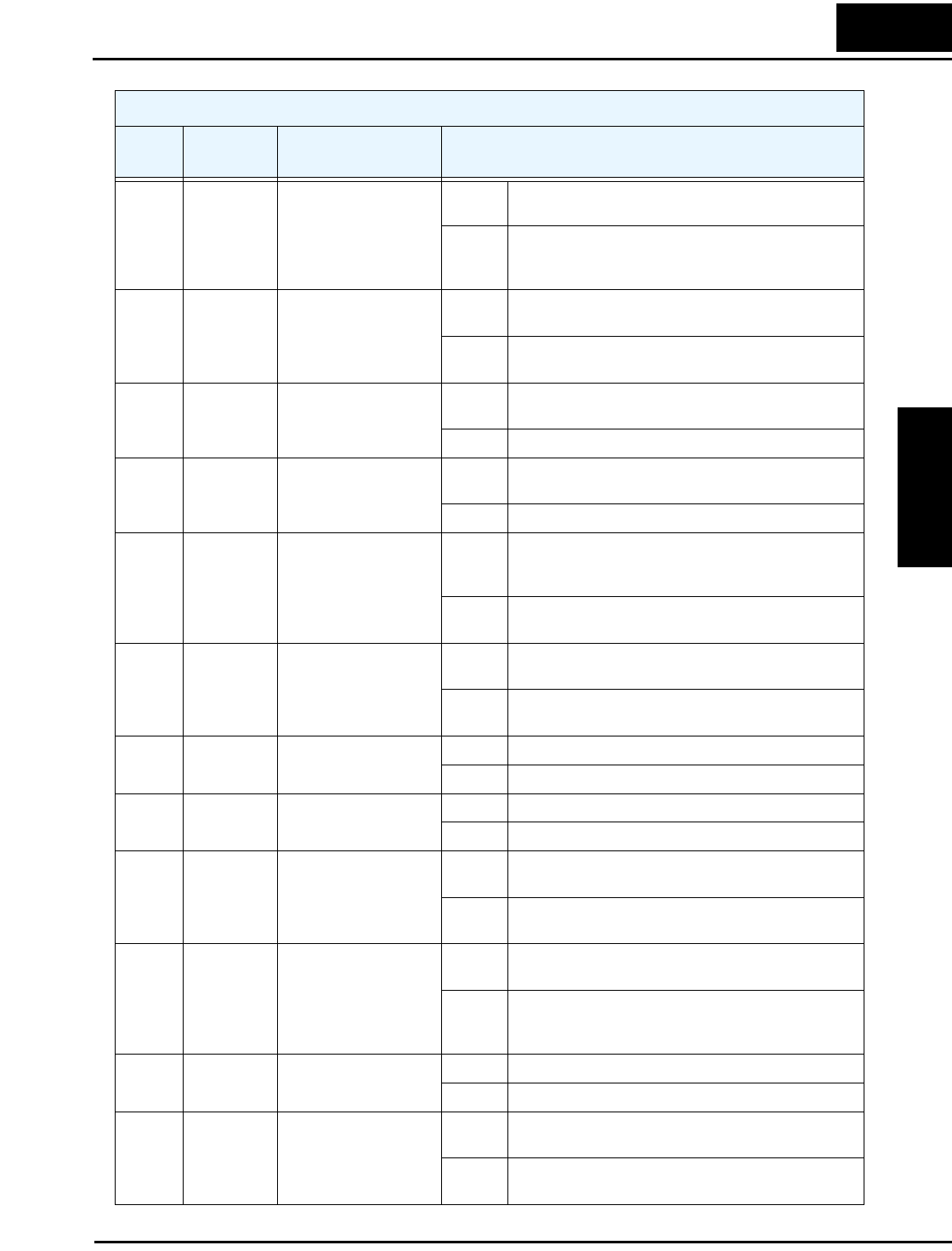
06 FA3 Frequency arrival type
3 – at frequency
ON when output to motor is at the FA threshold 1 (C042)
during accel, or at C043 during decel
OFF when the output to motor is not at either the FA
threshold 1 (C042) during accel or at C043 during
decel
07 OTQ Over-torque signal ON when the over-torque feature is enabled and the motor
is generating excess torque
OFF when the over-torque feature is disabled or the motor
is not generating excess torque
08 IP Instantaneous power
failure signal
ON when the inverter input power has decreased below
the acceptable input voltage level
OFF when the inverter input power is within rated range
09 UV Under-voltage signal ON when the inverter input power has decreased below
the acceptable input voltage level
OFF when the inverter input power is within rated range
10 TRQ In torque limit ON when the output torque exceeds level set for the
particular torque/frequency quadrant in effect during
operation
OFF when the output torque is less than the level set for the
operating quadrant
11 RNT Operation time over ON when the inverter Run time exceeds the limit set by
Run/power-on warning time (B034)
OFF when the inverter Run time is less than the limit set by
Run/power-on warning time (B034)
12 ONT Plug-in time over ON when the inverter plug-in time exceeds the set limit
OFF when the inverter plug-in time is less than the limit
13 THM Thermal alarm signal ON when the thermal limit for the motor is exceeded
OFF when the thermal limit is not exceeded
19 BRK Brake release signal ON when the inverter signals the external braking system
to release (open) its brake
OFF when the inverter is not driving the motor, and needs
the external brake engaged
20 BER Brake error signal ON when the output current is less than the set releasing
current
OFF when the braking function is not in use, or when the
output current to the motor is correct and it is safe to
release the brake
21 ZS Zero speed detect ON when the encoder pulses of the motor has stopped
OFF when motor rotation causes encoder pulses
22 DSE Speed deviation
maximum
ON when the velocity error exceeds the error threshold
defined for the encoder input
OFF when the velocity error is less than the error threshold
defined for the encoder input
Output Function Summary Table
Option
Code
Terminal
Symbol
Function Name Description