



















Using Intelligent Input Terminals
Operations
and Monitoring
4–20
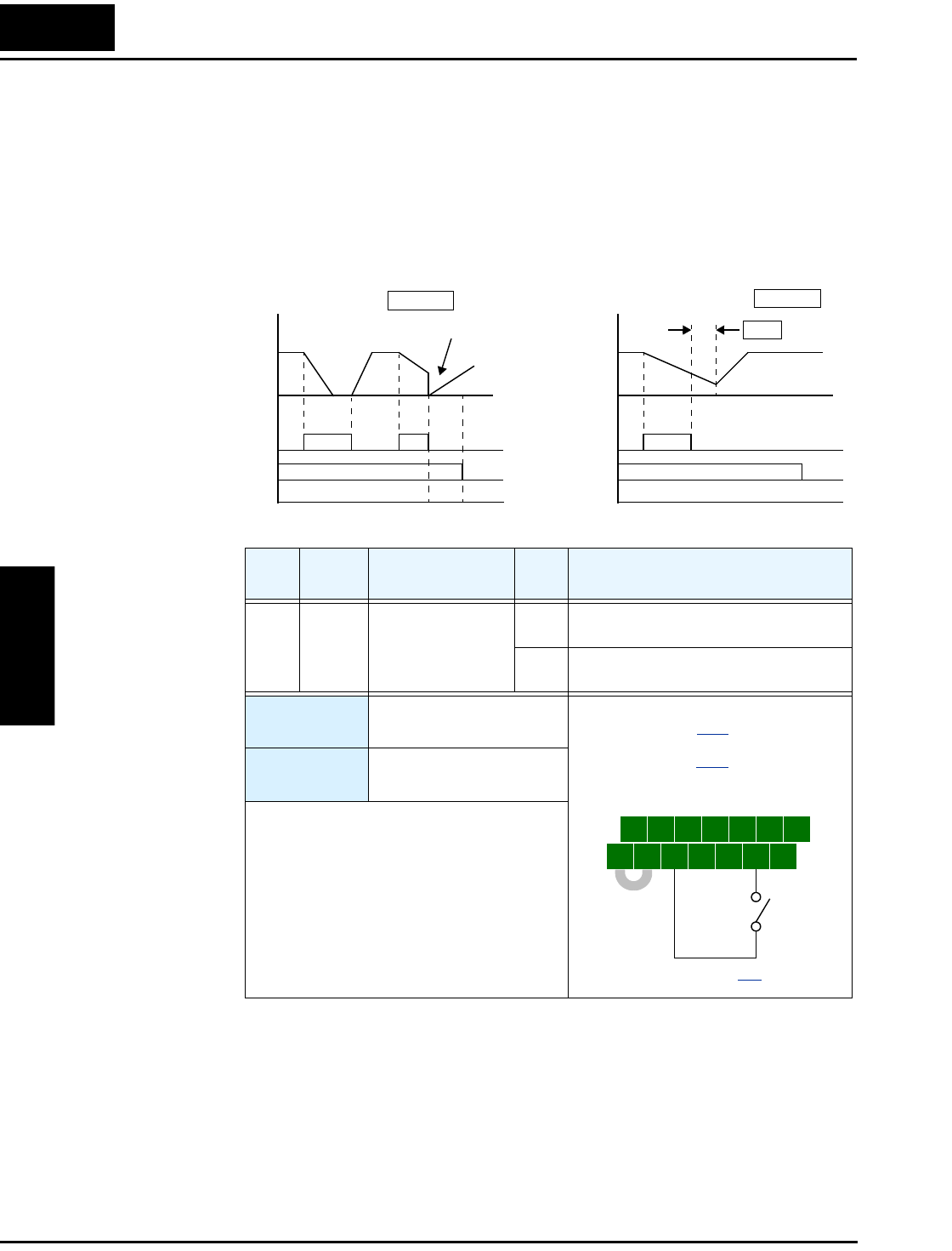
Free-run Stop When the terminal [FRS] is turned ON, the inverter turns OFF the output and the motor enters
the free-run state (coasting). If terminal [FRS] is turned OFF, the output resumes sending power
to the motor if the Run command is still active. The free-run stop feature works with other
parameters to provide flexibility in stopping and starting motor rotation.
In the figure below, parameter B088 selects whether the inverter resumes operation from 0 Hz
(left graph) or the current motor rotation speed (right graph) when the [FRS] terminal turns
OFF. The application determines the best setting.
Parameter B003 specifies a delay time before resuming operation from a free-run stop. To
disable this feature, use a zero delay time.
FRS
Switches
Motor
speed
[FW, RV]
Zero-frequency start
FRS
Switches
Motor
speed
Resume from current speed
wait time
[FW, RV]
B003
B088=01
B088=00
Resume from 0Hz
tt
Opt.
Code
Symbol Function Name
Input
State
Description
11 FRS Free-run Stop ON Causes output to turn OFF, allowing
motor to free run (coast) to stop
OFF Output operates normally, so controlled
deceleration stops motor
Valid for
inputs:
C001, C002, C003, C004,
C005, C006, C007, C008
Required
settings:
B003, B088, C011 to C018
Notes:
• When you want the [FRS] terminal to be
active low (normally closed logic), change
the setting (C011 to C018) that corresponds
to the input (C001 to C008) that is assigned
the [FRS] function.
5 3 1
7 6 4 2
8
FW
TH
PLC
CM1
P24
CM1
See I/O specs on page 4–9.
Example: (Default input configuration
shown—see page 3–47
. Jumper position
shown is for –xFU/-xFR models; for –xFE
models, see page 4–12
.)
FRS