



















Introduction to Variable-Frequency Drives
Geting Started
1–16
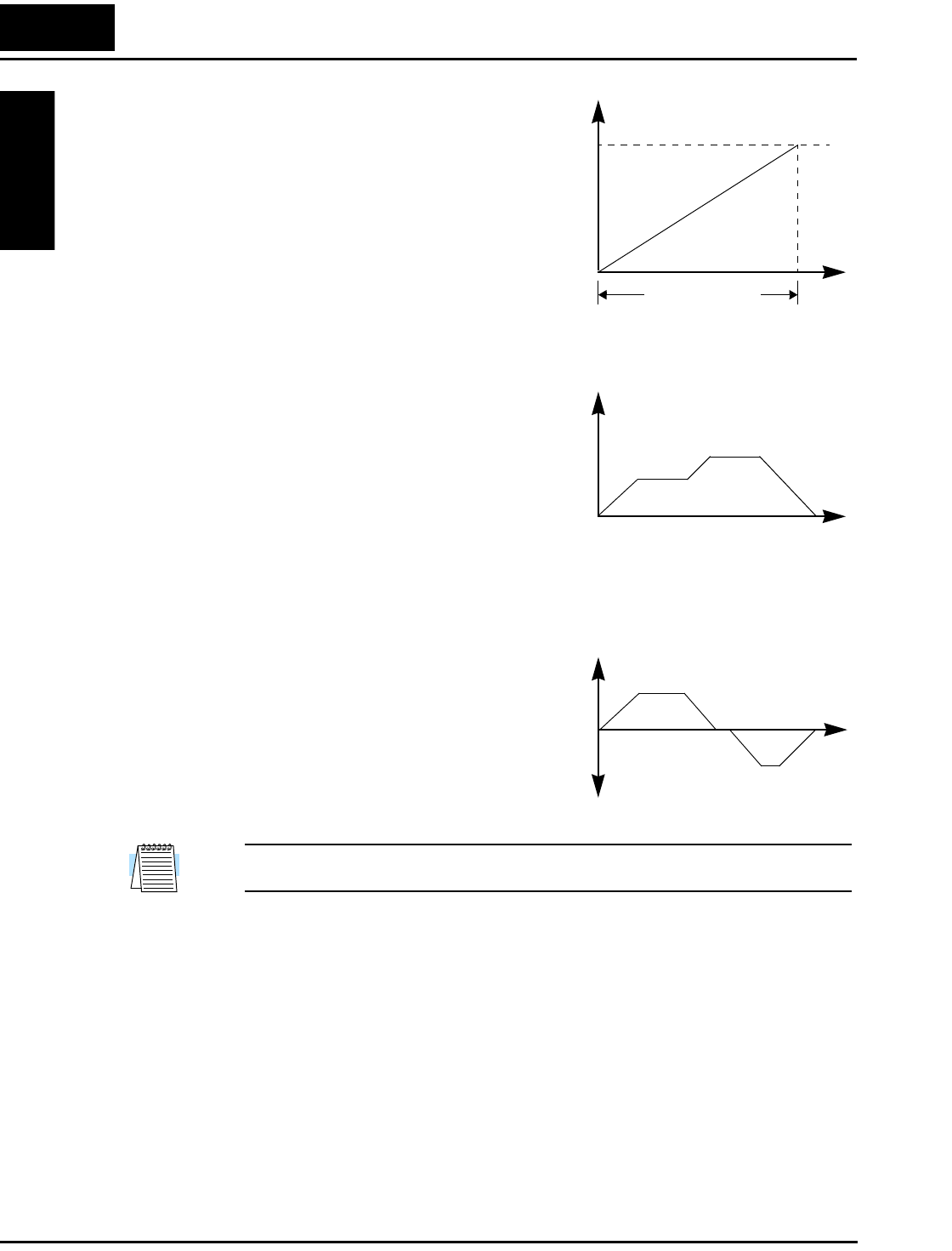
Acceleration and deceleration settings
specify the time required to go from a stop to
maximum frequency (or visa versa). The
resulting slope (speed change divided by
time) is the acceleration or deceleration. An
increase in output frequency uses the accel-
eration slope, while a decrease uses the
deceleration slope. The accel or decel time a
particular speed change depends on the
starting and ending frequencies. However,
the slope is constant, corresponding to the
full-scale accel or decel time setting.
For example, the full-scale acceleration
setting (time) may be 10 seconds—the time
required to go from 0 to 60 Hz.
The SJ300 inverter can store up to 16 preset
speeds. And, it can apply separate accelera-
tion and deceleration transitions from any
preset to any other preset speed. A multi-
speed profile (shown at right) uses two or
more preset speeds, which you can select via
intelligent input terminals. This external
control can apply any preset speed at any
time. Alternatively, the selected speed is
infinitely variable across the speed range.
You can use the potentiometer control on the
keypad for manual control. The drive
accepts analog 0-10V signals and 4-20 mA
control signals as well.
The inverter can drive the motor in either
direction. Separate FW and RV commands
select the direction of rotation. The motion
profile example shows a forward motion
followed by a reverse motion of shorter
duration. The speed presets and analog
signals control the magnitude of the speed,
while the FW and RV commands determine
the direction before the motion starts.
NOTE: The SJ300 can move loads in both directions. However, it is not designed for use in
servo-type applications that use a bipolar velocity signal that determines direction.
Speed
Maximum speed
0
Acceleration
t
Acceleration (time) setting
Speed
Speed 1
Speed 2
t
Multi-speed Profile
Speed
Forward move
Reverse move
t
Bi-directional Profile