



















Using Intelligent Output Terminals
Operations
and Monitoring
4–50
Over-torque
Signal
The Over-torque function [OTQ] turns ON when the estimated value of output torque of motor
increases more than the arbitrary level set for the output. Recall that the torque limit function,
covered in “
Torque Limit” on page 4–37, actually limits the torque during certain operating
conditions. Instead, the over-torque output feature only monitors the torque, turning ON output
[OTQ] if the torque is above programmable thresholds you set. The [OTQ] function is valid
only for sensorless vector control, 0-Hz domain sensorless vector control, or vector control
with sensor. Do not use the [OTQ] output, except for these inverter operational modes.
The assignment of the Over-torque function to an output terminal [OTQ] is detailed in the
following table.
Code Function/Description Data or Range
C055 Over-torque, forward-driving level setting 0 to 200%
C056 Over-torque, reverse-regenerating, level setting 0 to 200%
C057 Over-torque, reverse-driving, level setting 0 to 200%
C058 Over-torque, forward-regenerating, level setting 0 to 200%
C021
to
C025
Intelligent output terminal [11] to [15] function 07
Opt.
Code
Symbol Function Name
Output
State
Description
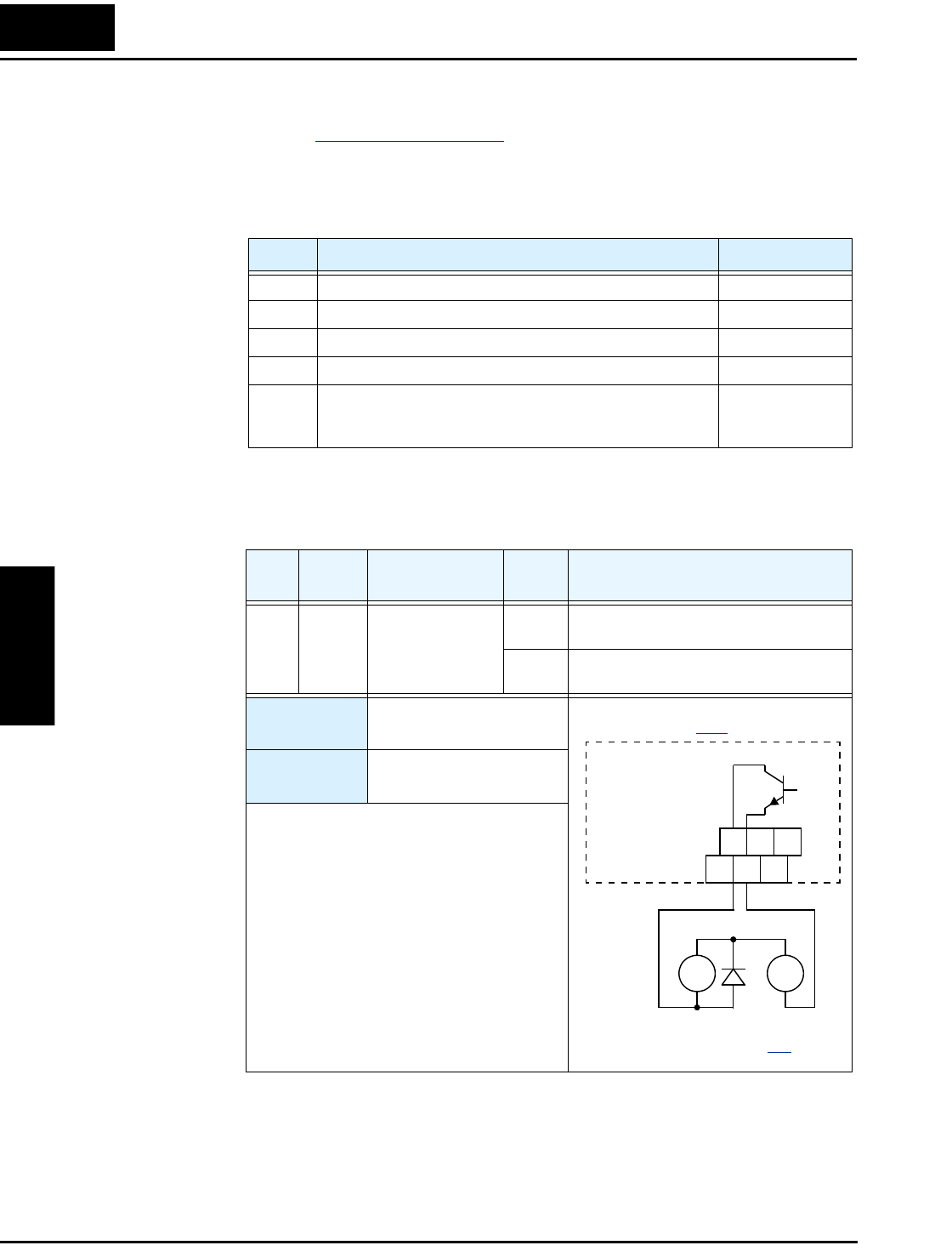
07 OTQ Over-torque ON when estimated torque exceeds the level
set in C055 to C058
OFF when estimated torque is below the levels
set in C055 to C058
Valid for
outputs:
11, 12, 13, 14, 15,
AL0 – AL2
Required
settings:
C055, C056, C057, C058
A044 = 03 or 04 or 05
Notes:
• This output is valid only for sensorless
vector control, 0-Hz domain sensorless vector
control, or vector control with sensor
CM2
1314
15
11
12
See I/O specs on page 4–9.
Inverter output
terminal circuit
RY
+
–
Example: (Default output configuration
shown—see page 3–53
.)
OTQ