
















8. Setup
8 - 9
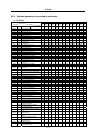
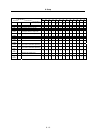
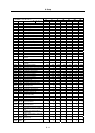
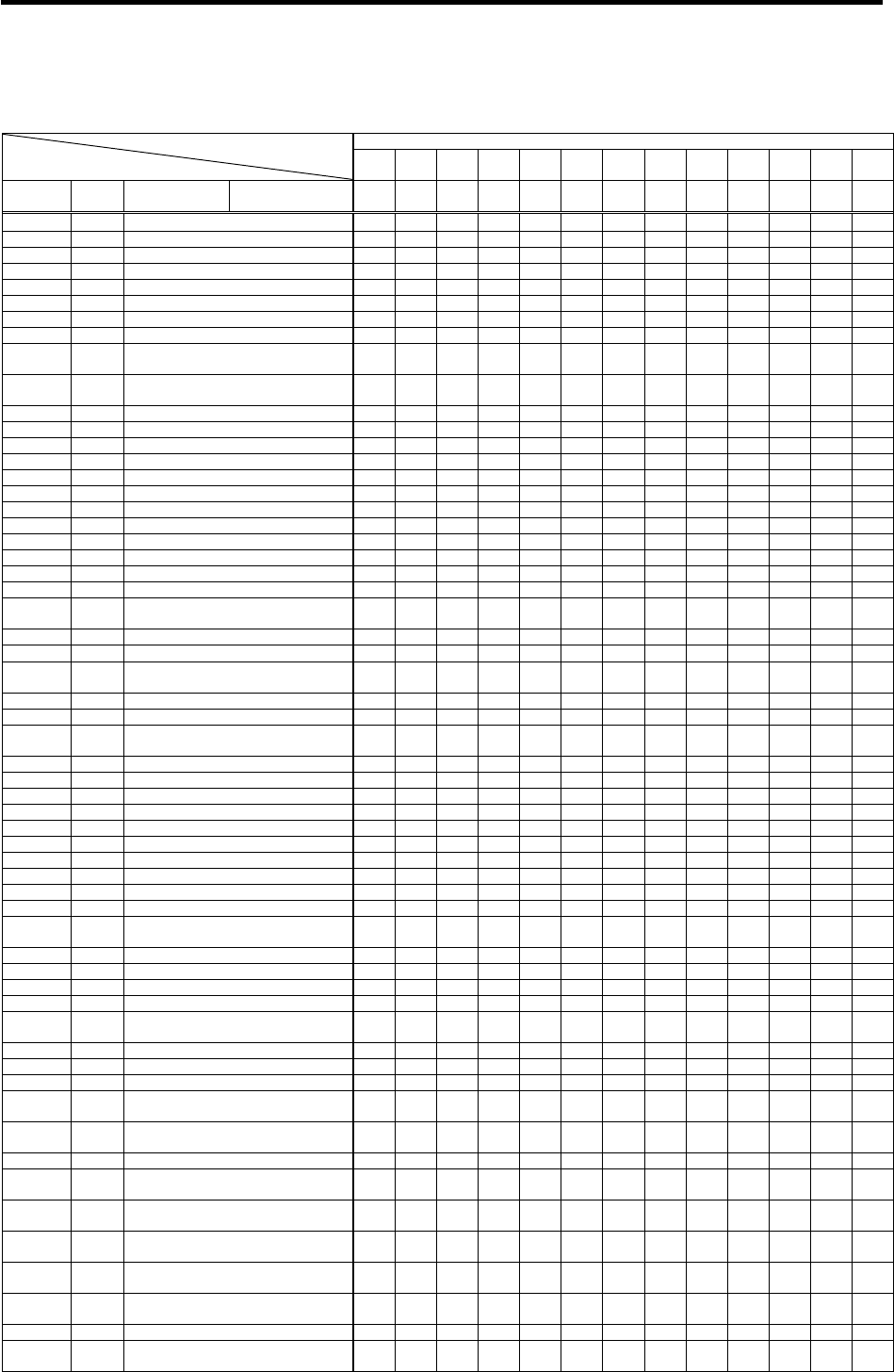
8-2-3 Standard parameter list according to servomotor
(1) HF Series
Standard HF motor
Motor
Parameter
HF
75
HF
105
HF
54
HF
104
HF
154
HF
224
HF
204
HF
354
HF
123
HF
223
HF
303
HF
142
HF
302
No. Abbrev. Details Unit capacity 20/40 20/40 20/40 20/40
40/60
/80
60
40/60
/80
60/80 20 40 60 20 40
SV001 PC1 Motor side gear ratio ---
--- --- --- --- --- --- --- --- --- --- --- ---
SV002 PC2 Machine side gear ratio --- --- --- --- --- --- --- --- --- --- --- --- ---
SV003 PGN1 Position loop gain 1 33 33 33 33 33 33 33 33 33 33 33 33 33
SV004 PGN2 Position loop gain 2 0 0 000000 0 0 000
SV005 VGN1 Speed loop gain 1 20 40 50 50 50 70 100 120 70 70 140 70 140
SV006 VGN2 Speed loop gain 2 0 0 000000 0 0 000
SV007 VIL Speed loop delay compensation 0 0 000000 0 0 000
SV008 VIA Speed loop lead compensation 1364 1364 1364 1364 1364 1364 1364 1364 1364 1364 1364 1364 1364
SV009 IQA
Current loop q axis lead
compensation
6144 6144 6144 6144 6144 6144 6144 6144 10240 8192 4096 15360 4096
SV010 IDA
Current loop d axis lead
compensation
6144 6144 6144 6144 6144 6144 6144 6144 10240 8192 4096 15360 4096
SV011 IQG Current loop q axis gain 768 512 1280 1024 1024 768 1024 1024 1280 1024 1280 2048 1280
SV012 IDG Current loop d axis gain 768 512 1280 1024 1024 768 1024 1024 1280 1024 1280 2048 1280
SV013 ILMT Current limit value 500 500 500 500 500 500 500 500 500 500 500 500 500
SV014 ILMTsp Current limit value in special control 500 500 500 500 500 500 500 500 500 500 500 500 500
SV015 FFC Acceleration rate feed forward gain 0 0 000000 0 0 000
SV016 LMC1 Lost motion compensation 1 0 0 000000 0 0 000
SV017 SPEC Servo specification selection 1000 1000 1000 1000 1000 1000 1000 1000 1000 1000 1000 1000 1000
SV018 PIT Ball screw pitch --- --- --- --- --- --- --- --- --- --- --- --- ---
SV019 RNG1 Position detector resolution --- --- --- --- --- --- --- --- --- --- --- --- ---
SV020 RNG2 Speed detector resolution --- --- --- --- --- --- --- --- --- --- --- --- ---
SV021 OLT Overload detection time constant 60 60 60 60 60 60 60 60 60 60 60 60 60
SV022 OLL Overload detection level 150 150 150 150 150 150 150 150 150 150 150 150 150
SV023 OD1
Excessive error detection width during
servo ON
66666666 6 6 666
SV024 INP In-position detection width 50 50 50 50 50 50 50 50 50 50 50 50 50
SV025 MTYP Motor/Detector type 221D 221E 2210 2211 2212 2216 2213 2214 2224 2226 2228 2225 2227
SV026 OD2
Excessive error detection width during
servo OFF
66666666 6 6 666
SV027 SSF1 Servo function selection 1 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000 4000
SV028 0 0 000000 0 0 000
SV029 VCS
Speed at the change of speed loop
gain
00000000 0 0 000
SV030 IVC Voltage non-sensitive compensation 0 0 000000 0 0 000
SV031 OVS1 Overshooting compensation 1 0 0 000000 0 0 000
SV032 TOF Torque offset 1 0 0 000000 0 0 000
SV033 SSF2 Servo function selection 2 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000
SV034 SSF3 Servo function selection 3 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000
SV035 SSF4 Servo function selection 4 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000 0000
SV036 PTYP Regenerative resistor type 1x00 1x00 1x00 1x00 1x00 1x00 1x00 1x00 1x00 1x00 1x00 1x00 1x00
SV037 JL Load inertia scale 0 0 000000 0 0 000
SV038 FHz1 Notch filter frequency 1 0 0 000000 0 0 000
SV039 LMCD Lost motion compensation timing 0 0 000000 0 0 000
SV040 LMCT
Lost motion compensation
non-sensitive band
00000000 0 0 000
SV041 LMC2 Lost motion compensation 2 0 0 000000 0 0 000
SV042 OVS2 Overshooting compensation 2 0 0 000000 0 0 000
SV043 OBS1 Disturbance observer filter frequency 0 0 000000 0 0 000
SV044 OBS2 Disturbance observer gain 0 0 000000 0 0 000
SV045 TRUB
Current compensation
(the high order 8 bits)
00000000 0 0 000
SV046 FHz2 Notch filter frequency 2 0 0 000000 0 0 000
SV047 EC1 Inductive voltage compensation gain 100 100 100 100 100 100 100 100 100 100 100 100 100
SV048 EMGrt Vertical axis drop prevention time 0 0 000000 0 0 000
SV049
PGN1s
p
Position loop gain 1 in spindle
synchronous control
15 15 15 15 15 15 15 15 15 15 15 15 15
SV050
PGN2s
p
Position loop gain 2 in spindle
synchronous control
00000000 0 0 000
SV051 DFBT Dual feedback control time constant 0 0 000000 0 0 000
SV052 DFBN
Dual feedback control non-sensitive
band
00000000 0 0 000
SV053 OD3
Excessive error detection width in
special control
00000000 0 0 000
SV054 ORE
Overrun detection width in closed loop
control
00000000 0 0 000
SV055 EMGx
Max. gate off delay time after
emergency stop
00000000 0 0 000
SV056 EMGt
Deceleration time constant at
emergency stop
00000000 0 0 000
SV057 SHGC SHG control gain 0 0 000000 0 0 000
SV058
SHGCs
p
SHG control gain in spindle
synchronous control
00000000 0 0 000