



















9. Adjustment
9 - 29
9-4 Settings for emergency stop
9-4-1 Deceleration control
If the deceleration stop function is validated, the MDS-R-V1/V2 servo drive unit will decelerate to stop
the motor according to the set time constants. After stopping, the drive unit enters the ready OFF state
and the dynamic brakes will be applied.
If an emergency stop factor occurs, operation will be stopped with the dynamic brakes.
<Features>
When the load inertia is large, deceleration stop can be executed at a shorter time than the dynamic
brakes.
(The stop time for the normal acceleration/deceleration time constants will be achieved.)
(1) Setting the deceleration control time constant
Set the time for stopping from the rapid traverse rate (rapid: axis specification parameter) in the
deceleration time constant for emergency stop (SV056: EMGt). The operation stops with the
position loop stop when "0" is set.
If linear acceleration/deceleration is selected for rapid traverse, the same value as the acceleration/
deceleration time constant (G0tL) will be the standard value. If another acceleration/deceleration
pattern is selected, set rapid traverse to linear acceleration/deceleration and adjust to a suitable
acceleration/deceleration time constant. Use that value as the standard value.
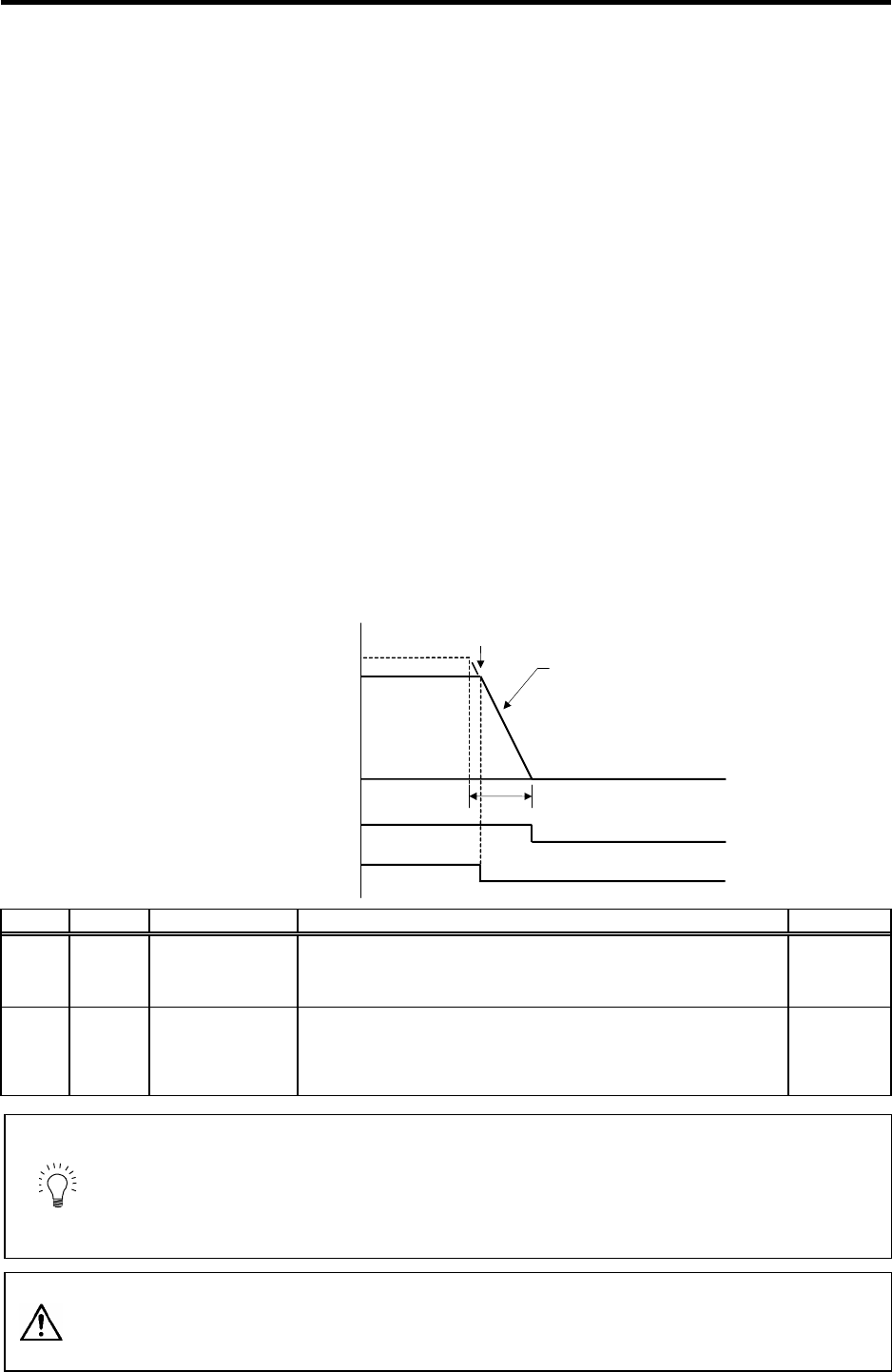
<Operation>
When an emergency stop occurs, the motor will decelerate at the same inclination from each
speed.
No. A
bbr. Parameter name Explanation Setting range
SV055 EMGx Max. gate off delay
time after
emergency stop
Set the maximum delay time from when emergency stop is input to when
READY ON is kept.
Normally, set the value of SV056x1.1-fold.
For contactor control axis, set the maximum value of all connected axes.
0 to 20000
(ms)
SV056 EMGt Deceleration time
constant at
emergency stop
In the vertical axis drop prevention time control, set the time constant
used for the deceleration control at emergency stop. Set a length of time
that takes from rapid traverse rate (rapid) to stopping.
Normally, set the same value as the rapid traverse
acceleration/deceleration time constant.
0 to 20000
(ms)
POINT
1. Deceleration control will not take place when a servo alarm, for which the
stopping method is dynamic, occurs. The motor will stop with dynamic
braking regardless of the parameter setting.
2. If the power fails and the deceleration time constant is set to a relatively long
time, the braking method may change from deceleration control to dynamic
braking due to a drop in the bus voltage in the drive unit.
CAUTION
If the deceleration control time constant (EMGt) is set to a value longer than the
acceleration/deceleration time constant, the overtravel point (stroke end point)
may be exceeded.
Take care as the axis could collide with the machine end.
Dynamic brake
Emergency stop occurrence
RAPID
EMGt
Constant inclination
deceleration
Motor speed
Time
Motor brake control output (MBR)
OFF
OFF
ON
ON