



















Appendix 2. Selection
A2 - 14
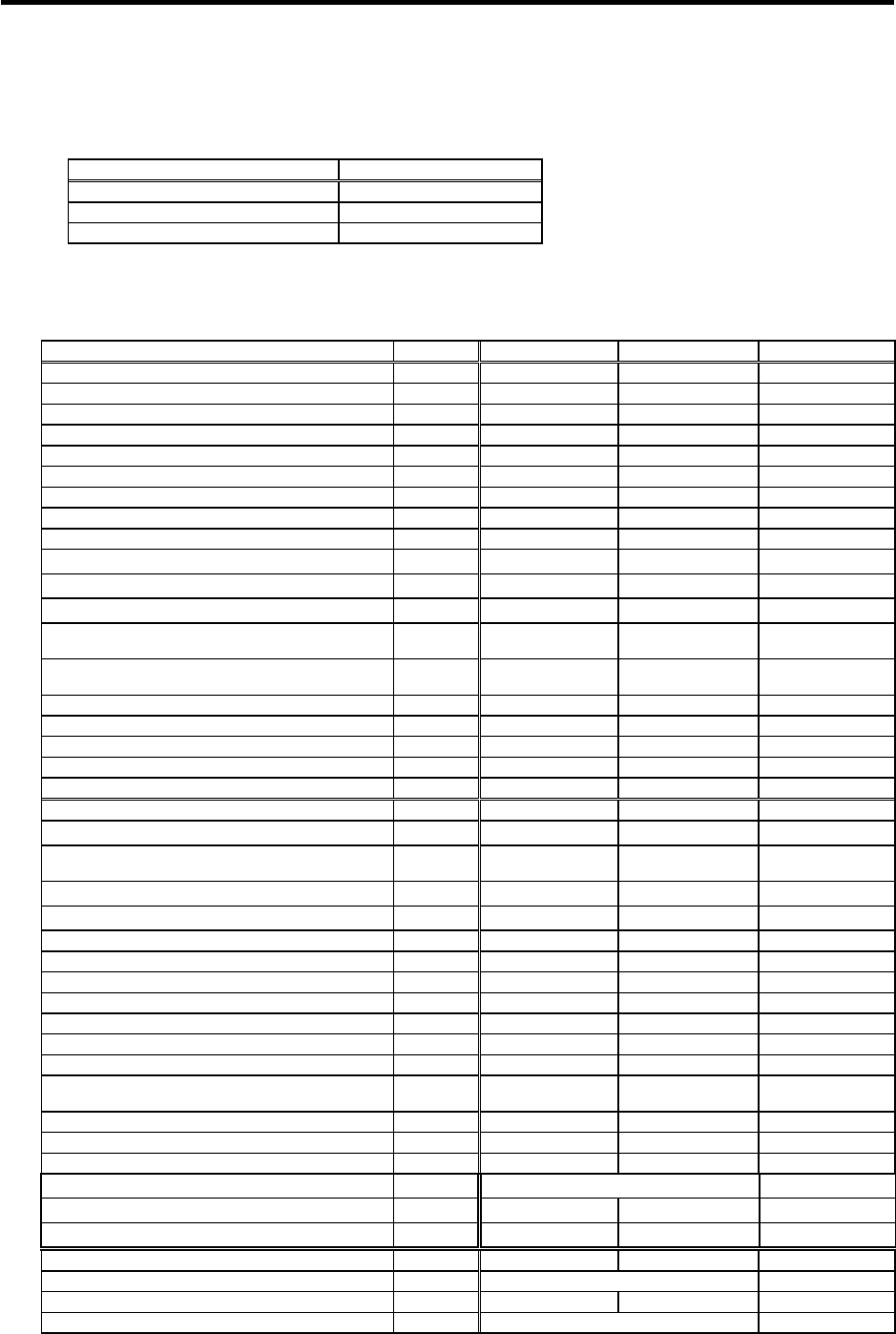
Appendix 2-3-3 Servo selection results
As a result of the servo selection calculations, the servo specifications for the Z axis of this machining
center have been determined.
Item Type
Servo drive unit MDS-R-V1-80
Servomotor HF203B
Regenerative resistor unit MR-RB30
The in the motor type will be decided based on separate machine specifications such as motor shaft
shape and absolute position system.
The following table shows the servo selections for all axes.
Item Unit X axis Y axis Z axis
Axis type Linear Linear Linear
Movement direction Horizontal Horizontal Vertical
Table support method Rolling Rolling Rolling
Table movement friction coefficient % 5 5 5
Ball screw diameter mm 50 50 50
Ball screw length mm 1200 1000 1000
Ball screw lead mm 10 10 10
Deceleration ratio 1 1 2/3
Primary side gear inertia
kg
.
cm
2
1.6
Secondary side gear inertia
kg
.
cm
2
8.1
Motor/ball screw connection section inertia
kg
.
cm
2
10.0 10.0
Mass of moving object installed on the machine
(table, etc.)
kg 600 500 500
Mass of standard-added-moving object
(workpiece, etc.)
kg 100 100 10
Rapid traverse rate mm/min 30000 30000 20000
Target acceleration/deceleration time constant ms 120 120 100
Rapid traverse positioning frequency times/min 12 12 12
Motor brake Without Without With
Motor shaft conversion rotation load inertia
kg
.
cm
2
67.4 57.9 26.5
Motor shaft conversion linear movement load
inertia
kg
.
cm
2
17.7 15.2 5.7
Motor shaft conversion total load inertia
kg
.
cm
2
85.1 73.1 32.2
Motor inertia
kg
.
cm
2
38.3 38.3 47.9
Motor shaft conversion load inertia magnification -fold 2.22 1.91 0.84
Motor shaft conversion unbalance torque N
.
m 0.0 0.0 5.3
Motor shaft conversion friction torque N
.
m 0.55 0.47 0.27
Motor shaft conversion total load torque N
.
m 0.55 0.47 5.57
Motor speed during rapid traverse r/min 3000 3000 3000
Rapid traverse minimum
acceleration/deceleration time constant
ms 118.1 106.4 90.5
Maximum torque during motor stop N
.
m 0.55 0.47 5.57
Maximum load rate during motor stop % 4.0 3.4 40.7
Regenerative energy per braking (per cycle) J 852.3 (total of X, Y axes) 1470.6
MR-RB30 tolerable positioning frequency times/min 16.8 16.8 19.6
MR-RB50 tolerable positioning frequency times/min 28.2 28.2 32.6
Servo drive unit type MDS-R-V2-8080 MDS-R-V1-80
Servomotor type HF203 HF203 HF203B
Regenerative resistor type MR-RB30 MR-RB30