
















8. Setup
8 - 13
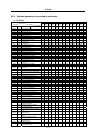
8-3 List of parameters
No. Abbrev. Parameter name Explanation
Setting
range (Unit)
SV001 PC1* Motor side gear ratio 1 to 32767
SV002 PC2*
Machine side gear
ratio
Set the motor side and machine side gear ratio.
For the rotary axis, set the total deceleration (acceleration) ratio.
Even if the gear ratio is within the setting range, the electronic gears may
overflow and cause initial parameter error (servo alarm No. 37).
1 to 32767
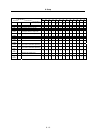
SV003 PGN1 Position loop gain 1
Set the position loop gain. The standard setting is "33".
The higher the setting value is, the more precisely the command can be
followed and the shorter the positioning time gets, however, note that a
bigger shock is applied to the machine during acceleration/deceleration.
When using the SHG control, also set SV004 (PGN2) and SV057 (SHGC).
1 to 200
(rad/s)
SV004 PGN2 Position loop gain 2
When using the SHG control, also set SV003 (PGN1) and SV057 (SHGC).
When not using the SHG control, set to "0".
0 to 999
(rad/s)
SV005 VGN1 Speed loop gain 1
Set the speed loop gain.
Set this according to the load inertia size.
The higher the setting value is, the more accurate the control will be,
however, vibration tends to occur.
If vibration occurs, adjust by lowering by 20 to 30%.
The value should be determined to be 70 to 80% of the value at the time
when the vibration stops.
1 to 999
VGN1
VGN2
VCS VLMT
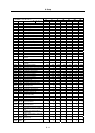
SV006 VGN2 Speed loop gain 2
If the noise is bothersome at high speed
during rapid traverse, etc, lower the speed
loop gain.
As in the right figure, set the speed loop
gain of the speed 1.2 times as fast as the
motor's maximum speed, and use this with
SV029 (VCS).
When not using, set to "0".
0
(Maximum speed*1.2)
-1000 to
1000
SV007 VIL
Speed loop delay
compensation
Set this when the limit cycle occurs in the full-closed loop, or overshooting
occurs in positioning.
When you set this parameter, make sure to set the torque offset (SV032
(TOF)). When not using, set to “0”.
0 to 32767
SV008 VIA
Speed loop lead
compensation
Set the gain of the speed loop integration control.
The standard setting is "1364". During the SHG control, the standard
setting is "1900". Adjust the value by increasing/decreasing it by about 100
at a time.
Raise this value to improve contour tracking precision in high-speed
cutting. Lower this value when the position droop vibrates (10 to 20Hz).
1 to 9999
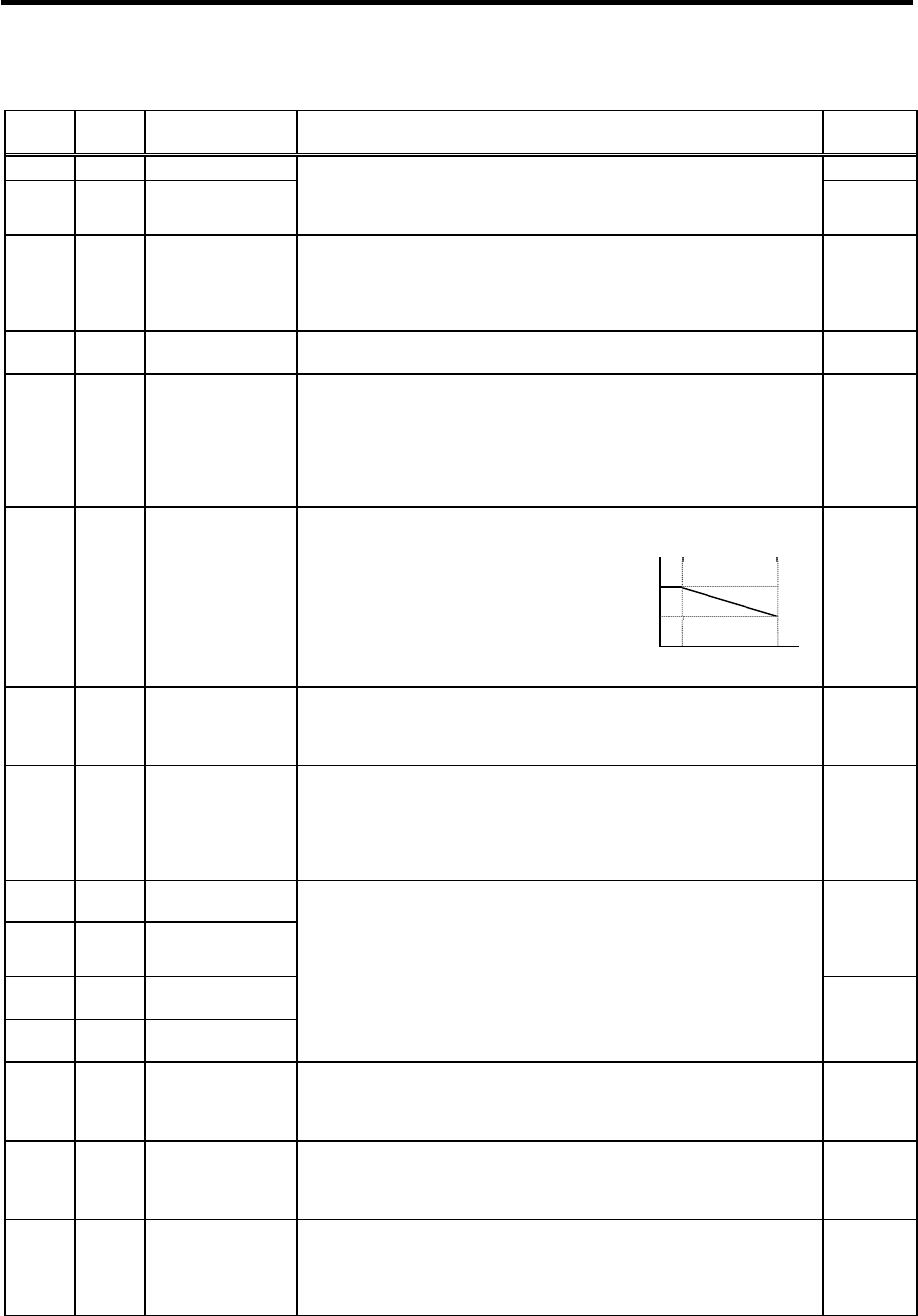
SV009 IQA
Current loop q axis
lead compensation
SV010 IDA
Current loop d axis
lead compensation
Set the gain of current loop.
As this setting is determined by the motor's electrical characteristics, the
setting is fixed for each type of motor.
Set the standard values for all the parameters depending on each motor
type.
1 to 20480
SV011 IQG
Current loop q axis
gain
SV012 IDG
Current loop d axis
gain
1 to 4096
SV013 ILMT Current limit value
Set the normal current (torque) limit value. (Limit values for both + and -
direction.)
When the value is "500" (a standard setting), the maximum torque is
determined by the specification of the motor.
0 to 999
(Stall
current %)
SV014 ILMTsp
Current limit value in
special control
Set the current (torque) limit value in a special control (initial absolute
position setting, stopper control, etc). (Limit values for both of the + and -
directions.)
Set to "500" when not using.
0 to 999
(Stall
current %)
SV015 FFC
Acceleration rate
feed forward gain
When a relative error in the synchronous control is large, apply this
parameter to the axis that is delaying. The standard setting value is “0”.
For the SHG control, set to "100".
To adjust a relative error in acceleration/deceleration, increase the value by
50 to 100 at a time.
0 to 999
(%)
Parameters with an asterisk * in the abbreviation, such as PC1*, are validated with the NC power is turned ON again.