
















8. Setup
8 - 16
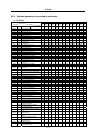
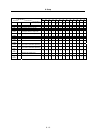
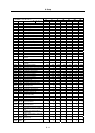
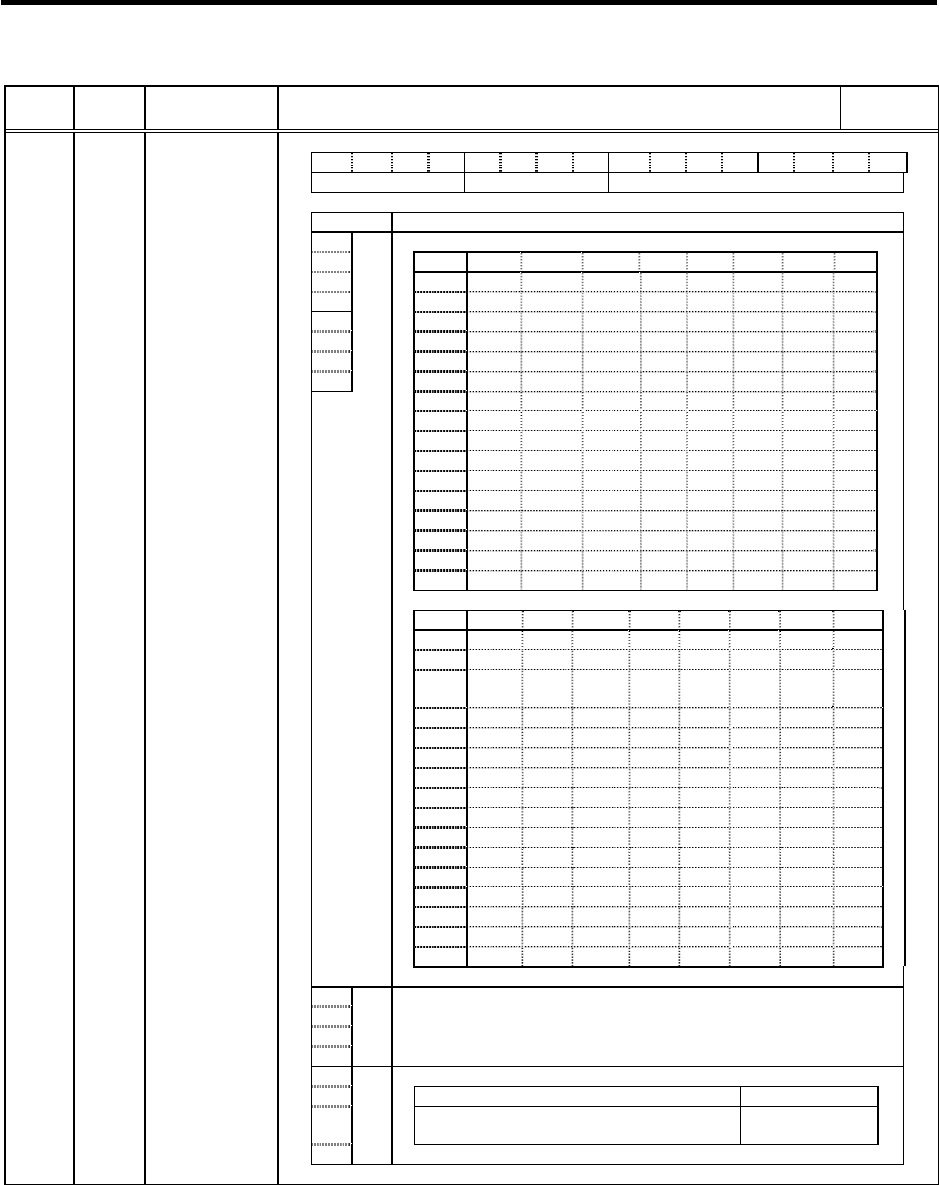
No. Abbrev. Parameter name Explanation
Setting
range (Unit)
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
pen ent mtyp
bit Explanation
0 Set the motor type.
1 Setting 0x 1x 2x 3x 4x 5x 6x 7x
2 x0
HF
53 HF54
3 x1
HF 03
HF104
4
mtyp
x2
HF153
HF154
5 x3
HF203
HF204
6 x4
HF353 HF
354
HF
123
7 x5
HF
142
x6
HF224 HF
223
x7
HF
302
x8
HF
303
x9
xA
xB
xC
xD
HF
44
HF
75
xE
HF
74
HF
105
xF
Setting 8x 9x Ax Bx Cx Dx Ex Fx
x0
x1
SV025 MTYP*
Motor/Detector
type
x2
x3
x4
x5
x6
x7
x8
x9
xA
xB
xC
xD
xE
xF
8 Set the speed detector type.
9 Set "2".
A
ent
B
C Set the position detector type
D When applying semi-closed loop control: Set "2".
E
pen
Rectangular wave (ABZ) output type
When using relative position detector scale:
Set "8".
F
Parameters with an asterisk * in the abbreviation, such as PC1*, are validated with the NC power is turned ON again.