
















8. Setup
8 - 14
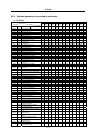
No. Abbrev. Parameter name Explanation
Setting
range
(Unit)
Set this when the protrusion (that occurs due to the non-sensitive band by
friction, torsion, backlash, etc) at quadrant change is too large.
This compensates the torque at quadrant change.
This is valid only when the lost motion compensation (SV027 (SSF1/lmc))
is selected. Only type 2 is compatible with the MDS-R-Vx Series.
Type 2: When SV027 (SSF1)/bit9, 8 (lmc)=10
Set the compensation amount based on the stall (rated) current of the
motor.
The standard setting is double of the friction torque. Setting to "0" means
the compensation amount is zero.
SV016 LMC1
Lost motion
compensation 1
When you wish different compensation amount depending on the direction
When SV041 (LMC2) is "0", compensate with the value of SV016 (LMC1)
in both of the + and -directions.
If you wish to change the compensation amount depending on the
command direction, set this and SV041 (LMC2). (SV016: + direction,
SV041: - direction. However, the directions may be opposite depending on
other settings.)
When "-1" is set, the compensation won’t be performed in the direction of
the command.
-1 to 200
(Stall
current %)
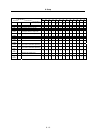
FEDCBA98765 4 3 2 10
spm abs fdir vfb dfbx
bit Meaning when "0" is set Meaning when "1" is set
0
1 dfbx Dual feedback control stop Dual feedback control start
2
3 vfb Speed feedback filter stop Speed feedback filter start
4 fdir Position feedback forward polarity Position feedback reverse polarity
5
6
SV017 SPEC*
Servo specification
selection
7 abs Incremental control Absolute position control
8
9
A
B
C
D
E
spm
F
0 : Setting prohibited
1 : HF motor selection (standard)
2 to F : Setting prohibited
(Note 1) Set to "0" for bits with no particular description.
SV018 PIT* Ball screw pitch Set the ball screw pitch. Set to "360" for the rotary axis.
1 to 32767
(mm/rev)
Parameters with an asterisk * in the abbreviation, such as PC1*, are validated with the NC power is turned ON again.