



















9. Adjustment
9 - 4
9-2 Gain adjustment
9-2-1 Current loop gain
No. Abbrev. Parameter name Explanation Setting range
SV009 IQA
Current loop q axis leading
compensation
SV010 IDA
Current loop d axis leading
compensation
1 to 20480
SV011 IQG Current loop q axis gain
SV012 IDG Current loop d axis gain
Set the gain of current loop.
As this setting is determined by the motor’s electrical
characteristics, the setting is fixed for each type of motor.
Set the standard values for all the parameters depending on each
motor type.
1 to 4096
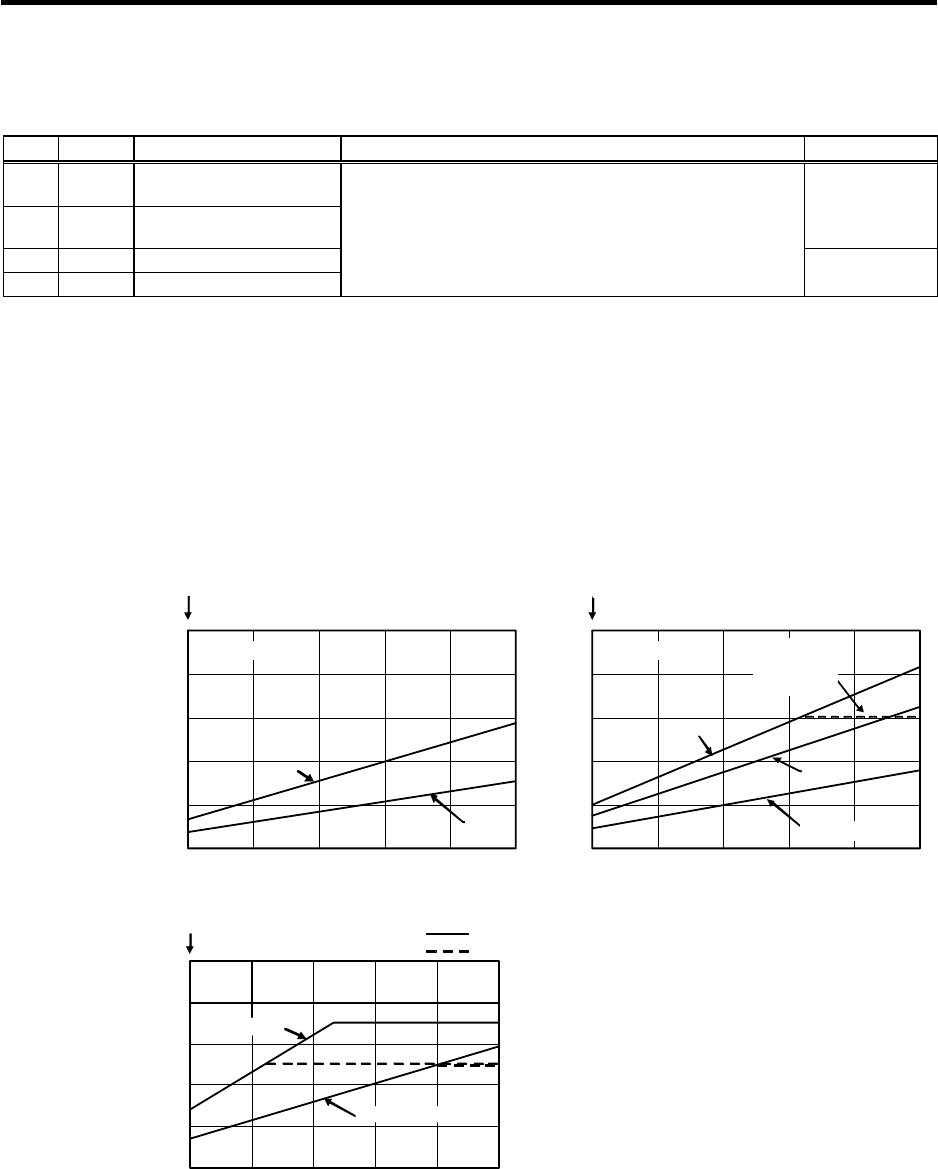
9-2-2 Speed loop gain
(1) Setting the speed loop gain
The speed loop gain (SV005 (VGN1)) is an important parameter for determining the responsiveness
of the servo control. During servo adjustment, the highest extent that this value can be set to becomes
important. The setting value has a large influence on the machine cutting precision and cycle time.
(a) Refer to the following table and set the standard VGN1 according to the size of the entire
load inertia (motor and machine load inertia).
(b) If the standard speed gain setting value is exceeded, the current command fluctuation will
increase even if the speed feedback fluctuates by one pulse. This can cause the machine to
vibrate easily, so set a lower value to increase the machine stability.
100 200 300 400 500 600
0
10
0
20
0
30
0
400
50
0
Motor unit
Load inertia scale [%]
Standard
VGN1
HF123,142,223,224
HF302,303
A
51
A
4
8
HF204
HF3 54
Load inertia scale(%) SV037 Setting value
Motor unit
10
0
20
0
0
50
0
40
0
30
0
100 200 40
0
60
0
300 500
HF54,104,15
<
HF54 - 354 >
Standard
VGN
Motor unit
HF105
Load inertia scale(%) SV037 Setting value
5
0
10
0
0
25
0
20
0
15
0
10
0
200 40
0
60
0
3
00 500
HF
7
< HF75, 105 > The upper
limit value
for A48