



















10. Troubleshooting
10 - 15
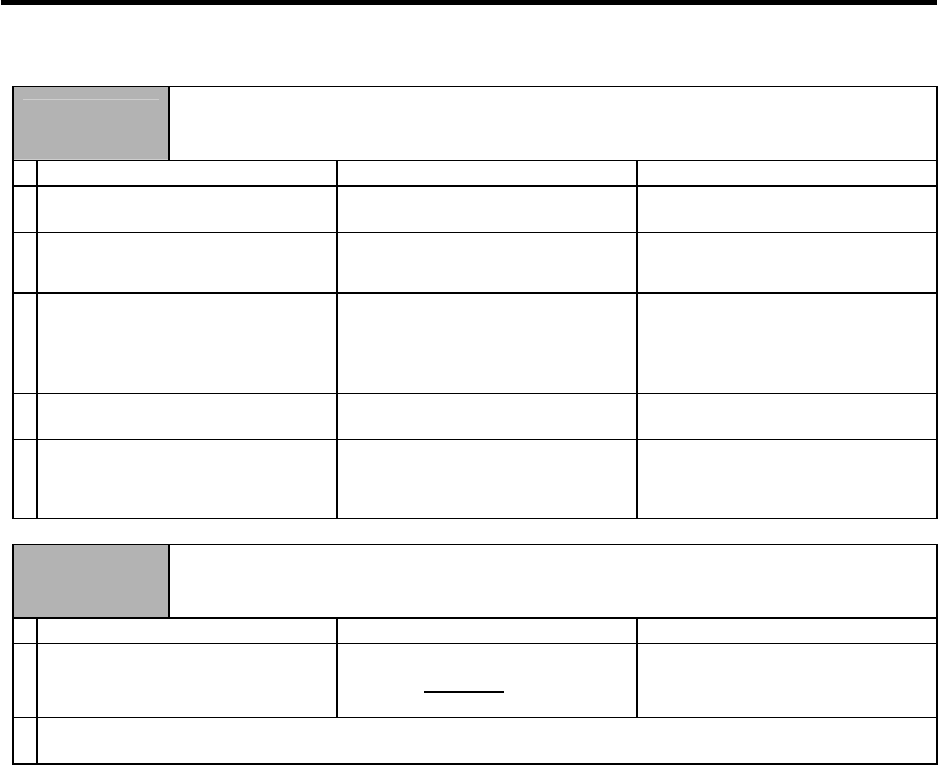
Alarm No.
51
Overload 2:
Current
command of more than 95% of the unit's max. current was being continuously given for longer
than 1 second.
Cause of occurrence Investigation items Remedy
1
The machine collided.
Check whether the machine collided. Check the cause of the collision.
2
The acceleration/deceleration time
constant is too short.
Is the current value on the NC servo
monitor screen abnormally large during
acceleration or deceleration?
Adjust the acceleration/deceleration
time constant.
3
Motor cable is incorrectly connected. Check the motor's power wire (U, V, W
phases).
The power wire is not connected.
Is the wire connected to another axis'
motor?
Correctly connect.
4
Detector is incorrectly connected.
Is the wire connected to another axis'
detector?
Correctly connect.
5
Detector is faulty.
Move the axis and check the FB signal. Replace the detector.
(When using the absolute position
system, the zero point must be
established again.)
Alarm No.
52
Excessive error 1:
A difference between the actual and theoretical motor positions during servo ON exceeded the setting
value.
Cause of occurrence Investigation items Remedy
Check the OD1 (SV023) setting value.
RAPID
1
The excessive error detection width is
too small.
Is OD1=
60PGN1
/ 2 satisfied?
Set the standard value according to the
rapid traverse rate and position loop gain.
2
Carry out the items for alarm No. 51.