
















8. Setup
8 - 17
No. Abbrev. Parameter name Explanation
Setting
range (Unit)
SV026 OD2
Excessive error
detection width
during servo OFF
Set the excessive error detection width when servo ON.
For the standard setting, refer to the explanation of SV023 (OD1).
When "0" is set, the excessive error detection will not be performed.
0 to 32767
(mm)
F E D C B A 9 8 7 6 5 4 3 2 1 0
zrn2 ovs lmc zrn3 vfct
bit Meaning when "0" is set Meaning when "1" is set
0
1
2
3
4
5
vfct
Set the number of compensation pulses of the jitter compensation.
00: Jitter compensation invalid
10: Jitter compensation 2 pulses
01: Jitter compensation 1 pulse
11: Jitter compensation 3 pulses
SV027
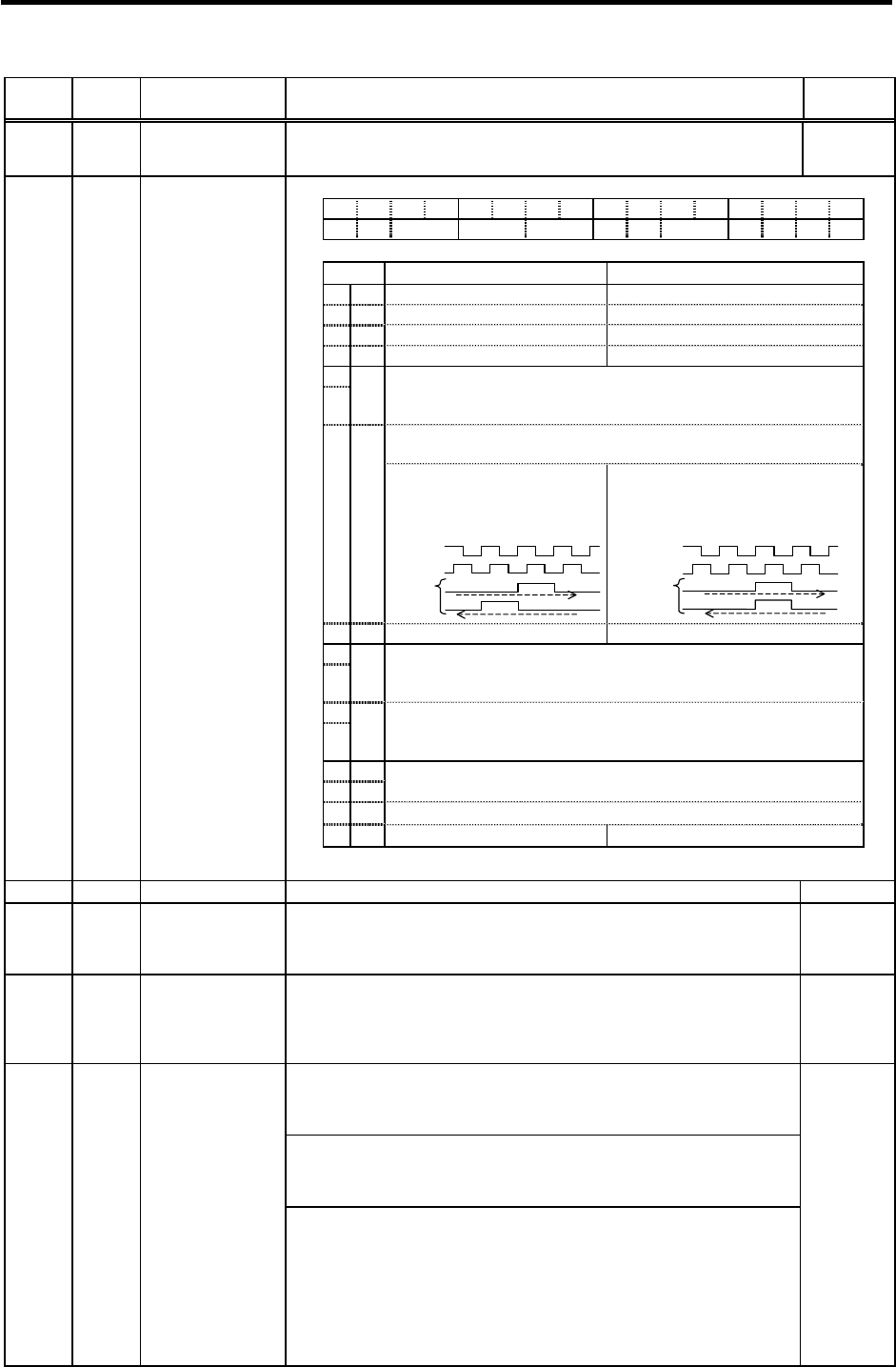
SSF1 Servo function
selection 1
Set depending on the Z-phase output type of scale.
6zrn3
Rising edge position of the Z-phase
does not depend on the movement
direction and is constant.
A
-phase
B-phase
Z
-phase
For Z phase, “H” section does not depend
on the movement direction and is constant.
A
-phase
B-phase
Z
-phase
7
8
9
lmc
Set the compensation amount with SV016 (LMC1) and SV041 (LMC2).
00: Lost motion compensation stop 10: Lost motion compensation type 2
01: Setting prohibited 11: Setting prohibited
A
B
ovs
Set the compensation amount with SV031 (OVS1) and SV042 (OVS2).
00: Overshooting compensation stop 10: Setting prohibited
01: Setting prohibited 11: Overshooting compensation type 2
C
D
E zrn2 Set to "1".
F
(Note) Set to "0" for bits with no particular description.
SV028 Not used. Set to “0”. 0
SV029 VCS
Speed at the
change of speed
loop gain
If the noise is bothersome at high speed during rapid traverse, etc, lower the
speed loop gain.
Set the speed at which the speed loop gain changes, and use this with
SV006 (VGN2). When not using, set to "0".
0 to 9999
(r/min)
SV030 IVC
Voltage
non-sensitive
compensation
When 100% is set, the voltage equivalent to the logical non-energized time
will be compensated.
When "0" is set, a 100% compensation will be performed.
Adjust in increments of 10% from the default value 100%.
If increased too much, vibration or vibration noise may be generated.
0 to 200
(%)
Set this if overshooting occurs during positioning. This compensates the
motor torque during positioning.
This is valid only when the overshooting compensation SV027 (SSF1.ovs)
is selected.
Type 3: When SV027 (SSF1)/bitB, A (ovs)=11
Set the compensation amount based on the motor’s stall current.
Increase by 1% and determine the amount that overshooting doesn’t
occur.
SV031 OVS1
Overshooting
compensation 1
When you wish different compensation amount depending on the direction
When SV042 (OVS2) is “0”, compensate with the value of SV031
(OVS1) in both of the + and -directions.
If you wish to change the compensation amount depending on the
command direction, set this and SV042 (OVS2). (SV031: + direction,
SV042: - direction. However, the directions may be opposite
depending on other settings.)
When “-1” is set, the compensation won’t be performed in the direction of
the command.
-1 to 100
(Stall
current %)