



















4 - 27
4 POSITIONING SIGNALS
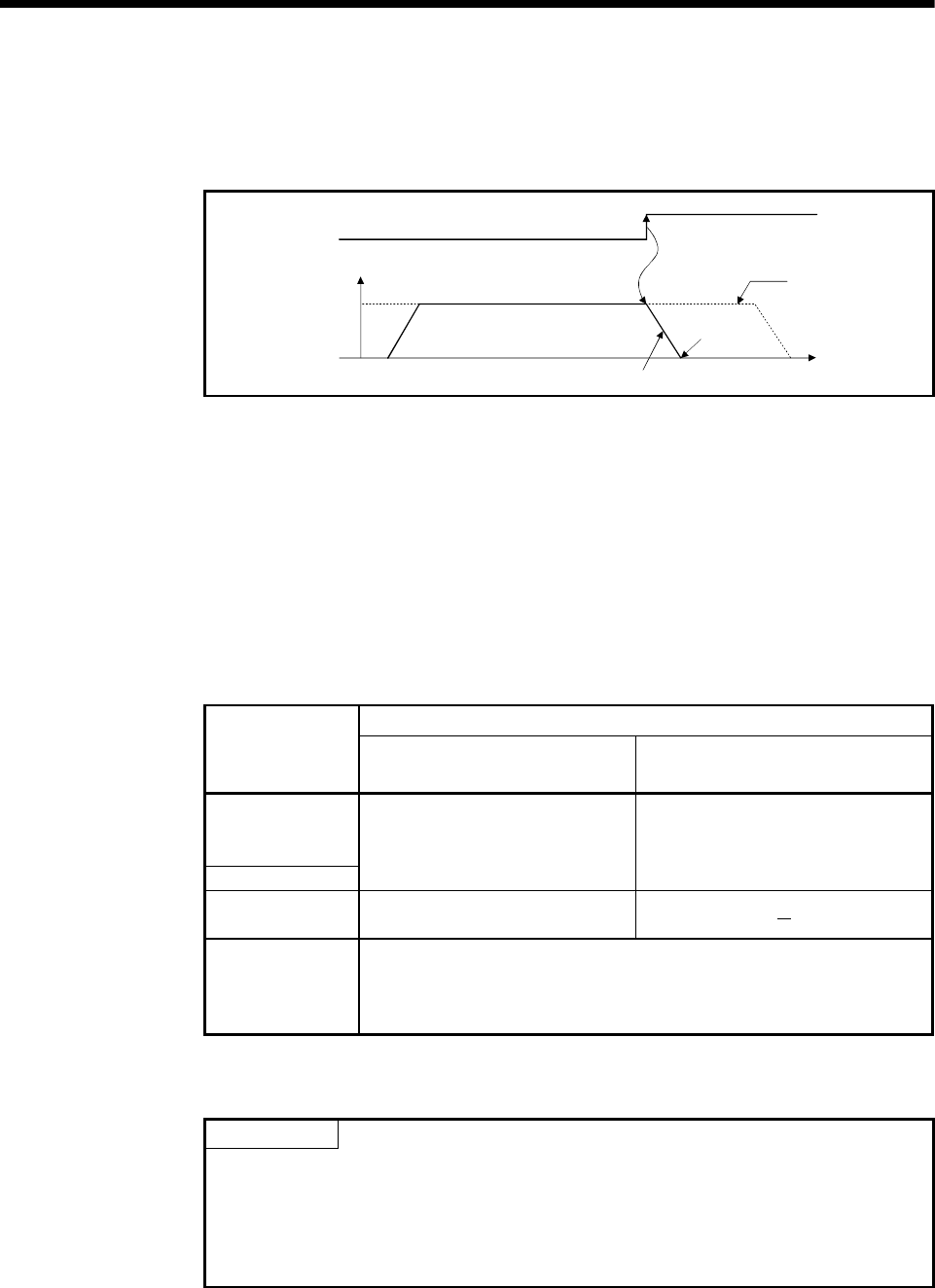
(2) Rapid stop command (M3201+20n)
(a) This command is a signal which stop a starting axis rapidly from an external
source and becomes effective when the signal turns off to on. (An axis for
which the rapid stop command turns on cannot be started.)
Rapid stop command
(M3201+20n)
Setting speed
OFF
ON
V
Rapid stop command
for specified axis
Control when rapid
stop command turns of
f
Stop
t
Rapid stop processing
(b) The program is ended by the rapid stop command at the automatic start by
the SVST instruction.
(The Motion program is stopped if any of the rapid stop commands for the
axis No. specified with the SVST instruction turns on.)
(c) The re-start command (M4404+10n) is valid only after the temporary stop
command (M4400+10n).
(d) The details of stop processing when the rapid stop command turns on are
shown below.
Processing at the turning rapid stop command on
Control details
during execution
During control During deceleration stop processing
Position control
during the Motion
program start
JOG operation
The axis decelerates to a deceleration
time set in the parameter block or
Motion program.
Deceleration processing is canceled and
rapid stop processing executed instead.
(Note-1)
Manual pulse
generator operation
An immediate stop is executed without
deceleration processing.
Home position return
(1) The axis decelerates to a stop in the rapid stop deceleration time set in the
parameter block.
(2) A "stop error during home position return" occurs and the error code [203] is
stored in the minor error storage register for each axis.
(Note-1) : The rapid stop deceleration time under G00, G01, G02, G03, G12, G13 or G32 including M-
code is equivalent to the acceleration time set in the parameter block.
POINT
If it is made to stop by turning on the rapid stop command (M3201+20n) during a
home position return, execute the home position return again.
If the rapid stop command turned on after the proximity dog ON in the proximity dog
type, execute the home position return after move to before the proximity dog ON
by the JOG operation or positioning.