


















4 - 65
4 POSITIONING SIGNALS
(6) Servo error code storage register (D8+20n) …......... Monitor device
(a) This register stores the corresponding error code (Refer to APPENDIX 1.4)
at the servo error occurrence. If another servo error occurs after error code
storing, the previous error code is overwritten by the new error code.
(b) Servo error codes can be cleared by an error reset command (M3208+20n).
(7) Home position return re-travel value storage register (D9+20n)
....…….. Monitor device
If the position stopped in the position specified with the travel value setting after
the proximity dog ON (refer to 7.3.1) by a peripheral device is not zero point, it
made to travel to zero point by re-travel in the Motion CPU.
(Data does not change with the last value in the data setting type.)
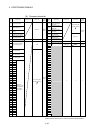
The following value is stored according to the number of feedback pulses of the
motor connected.
Number of feedback pulses Storage data
Less than 131072[PLS] Feedback pulses
131072[PLS] or more, 262144[PLS] or less 1/10 of feedback pulses
More than 262144[PLS] 1/10000 of feedback pulses
(8) Travel value after proximity dog ON storage register
(D10+20n, D11+20n) ………………………………… Monitor device
This register stores the travel value (unsigned) from the proximity dog ON to
home position return completion after the home position return starting.
(9) Execute program No. (main) storage register (D12+20n)
....…….. Monitor device
(a) The register stores the starting program No. (Motion program No.) at the
SVST instruction start.
The O No. of subprogram started by "M98" (subprogram call) is stored to
another register.
(b) The following value is stored in the following cases.
• JOG operation...................................... FFFFH
• Manual pulse generator operation ...... FFFEH
• Home position return operation ........... FFFCH
• Power supply on................................... FF00H
(c) When either of the following is being executed using a peripheral device in
the test mode, FFFD is stored in this register.
• Home position return.