


















4 - 19
4 POSITIONING SIGNALS
POINTS
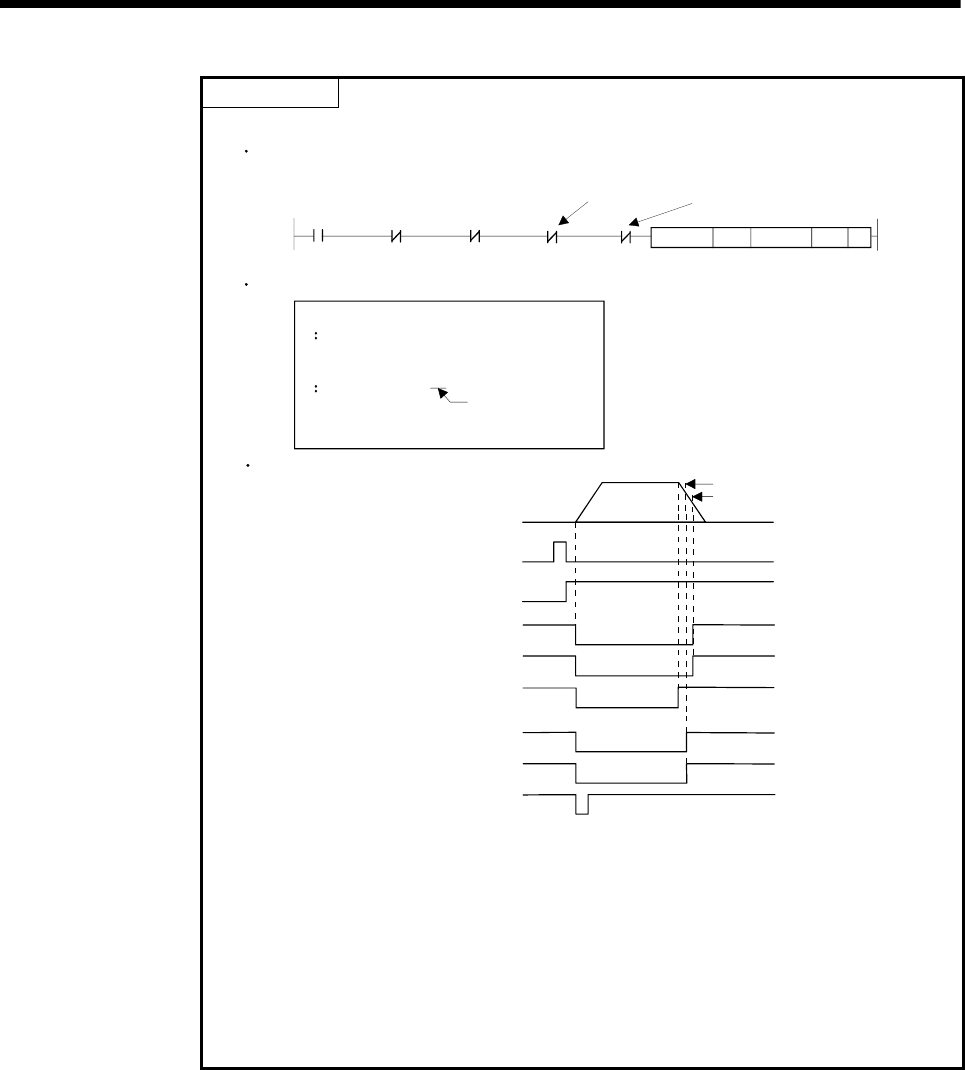
[Example2]
G0 travel block
Start accept flag (M2001+n)
In-position signal (M2402+20n)
X
Y
Z
Command in-position range
In-position range
Motion program (Axis
designation program) start
Command in-position signal
(M2403+20n)
X
Y
Z
Axis X,Y speed
(Z-axis does not travel)
Operation timing
PLC program
SP.SVST H3E1 "J1J2J3" K100 D0
Start
command
To self CPU
high sped
interrupt accept
flag from CPU
U3E1\G48.0
Start accept flag
of the axis No.1
(CPU No.2)
U3E1\G516.0
Start accept flag
of the axis No.2
(CPU No.2)
U3D1\G516.1
Start accept flag
of the axis No.3
(CPU No.2)
U3E1\G516.2
Motion program
O100;
G91;
G00 X100. Y100. Z0;
M02;
%
Add the travel value
"0" of Z-axis in the
Motion program.
(1) In-position signal is the same as the example 1.
(2) The command in-position check of Z-axis is also executed during axis travel by
addition of the travel value "0" of Z-axis in the Motion program. Therefore, the
command in-position signal of Z-axis turns OFF moment at the travel start,
however it is immediately judged as within the range, and turns ON by
processing of command-in-position check.