



















5 - 5
5 PARAMETERS FOR POSITIONING CONTROL
The travel value per motor rotation in this example is 0.000076 [mm].
For example, when ordering the travel value of 19 [mm], it becomes
249036.8 [PLS] and the fraction of 0.8 [PLS]. At this time, the Motion
CPU orders the travel value of 249036 [PLS] to the servomotor and the
fraction is memorized in the Motion CPU.
Positioning is performed by seasoning the travel value with this fraction at
the next positioning.
5.2.2 Backlash compensation amount
(1) Backlash compensation amount can be set within the following range.
(Refer to Section "7.1 Backlash Compensation Function" for details.)
Backlash compensation amount
0
Travel value per rotation
(=A)
65535[PLS]
(2) The servo error may occur depending on the type of the servo amplifier
(servomotor) or operation cycle even if the backlash compensation amount which
fulfill the above condition. Set the backlash compensation amount within the
following range in order for servo error may not occur.
Maximum motor speed [r/min]
1.2 operation cycle [ms]
A
60[s]
1000[ms]
[PLS]
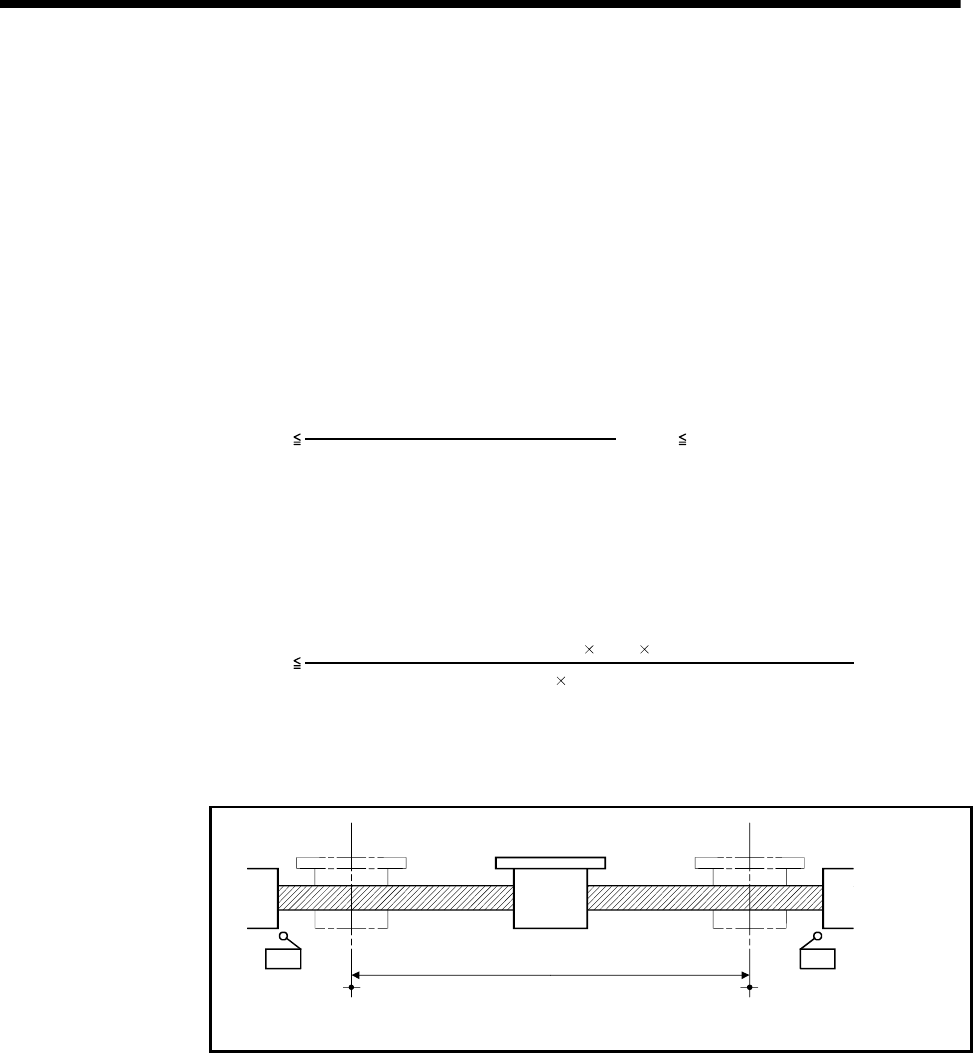
5.2.3 Upper/lower stroke limit value
The upper/lower limit value for the travel range of the mechanical system is set.
RLS
Stroke limit
(lower)
Stroke limit
(upper)
(Travel range of the machine)
Limit switch for
emergency stop
FLS
Fig. 5.3 Travel range at the upper/lower stroke limit value setting