



















APP - 7
A
PPENDICES
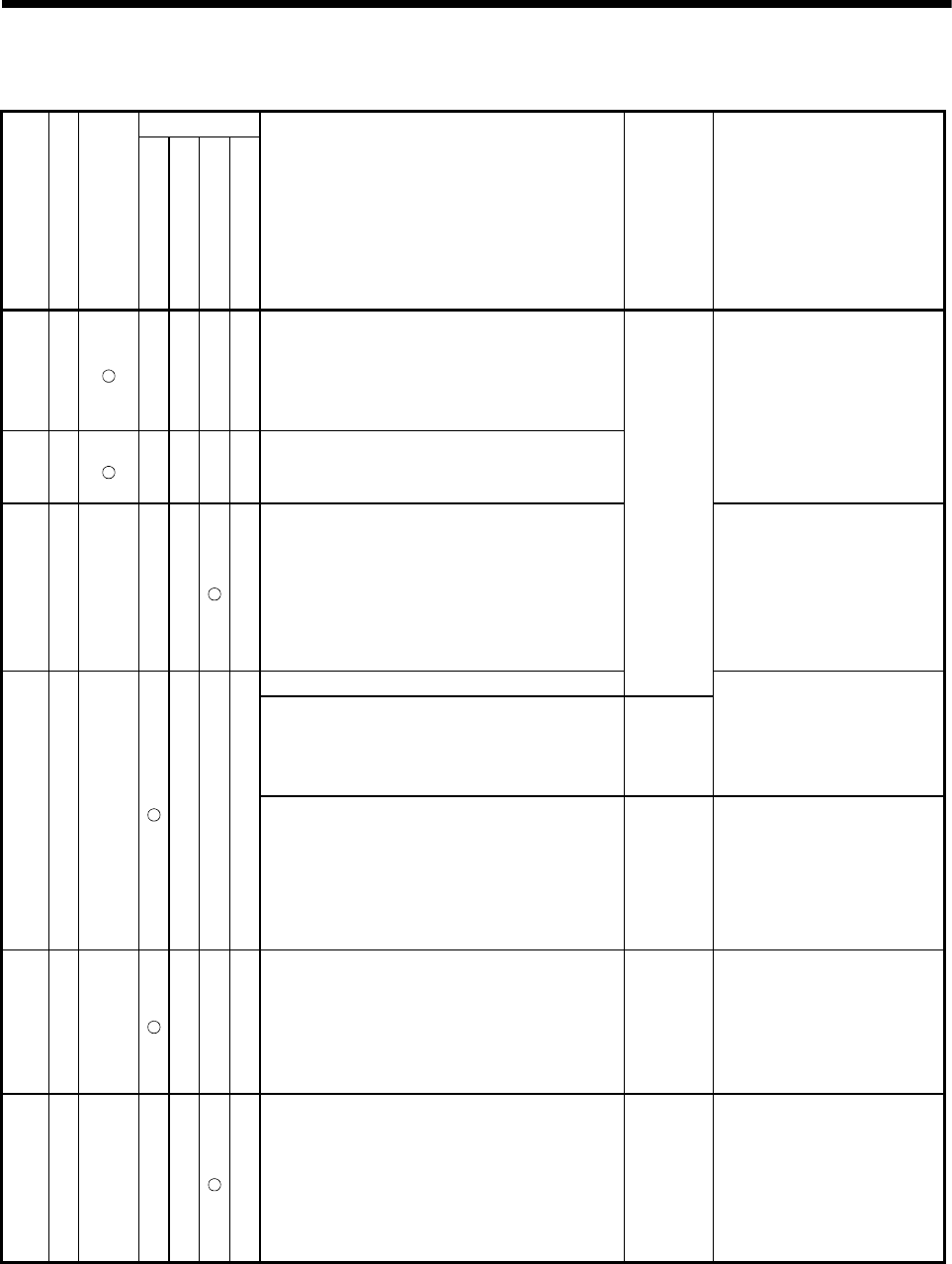
Table 1.4 Positioning control start error (100 to 199) list (Continued)
Control mode
Error
code
Control program
Axis designation program
(positioning)
JOG
Manual pulse generator
Home position return
OSC
Error cause
Error
processing
Corrective action
109
The address that does not generate an arc is set at
the central point-specified circular interpolation or
central point-specified helical interpolation.
(Relationship between the start point, central point
and end point.)
110
(Note)
The difference between the end point address and
ideal end point is outside the allowable error range
for circular interpolation at the circular interpolation.
• Correct the addresses of the
Motion program.
115
The home position return complete signal
(M2410+20n) turned on at the home position return
of proximity dog, dog cradle and stopper type.
• Do not start continuously for
the home position return.
Return to a point before the
proximity dog signal ON by
JOG operation or positioning
operation, etc., and perform
the home position return.
The setting JOG speed is "0".
Positioning
control
does not
start.
The setting JOG speed exceeded the JOG speed
limit value.
Control
with the
JOG speed
limit value.
• Set the correct speed (within
the setting range).
116
The setting JOG speed limit value exceeded the
setting range.
Control
with the
maximum
setting
range of
each
control unit.
• Set the correct JOG speed
limit value (within the setting
range).
117
Both of forward and reverse rotation were set at
the simultaneous start for the JOG operation.
Only the
applicable
axis set to
the forward
direction
starts.
• Set a correct data.
120
ZCT not set
The zero pass signal (M2406+20n) turned off at
the re-travel at the home position return for
proximity dog, count and limit switch combined
type or start in the home position return for data set
type.
Home
position
return is
not
completed
correctly.
• Execute the home position
return after the zero point
passed.
(Note): These errors are stored the error codes of the all applicable interpolation axes at the interpolation operation.