


















APP - 6
A
PPENDICES
(2) Positioning control start errors (100 to 199)
These errors are detected at the positioning control start.
The error codes, causes, processing, and corrective actions are shown in Table
1.4 below.
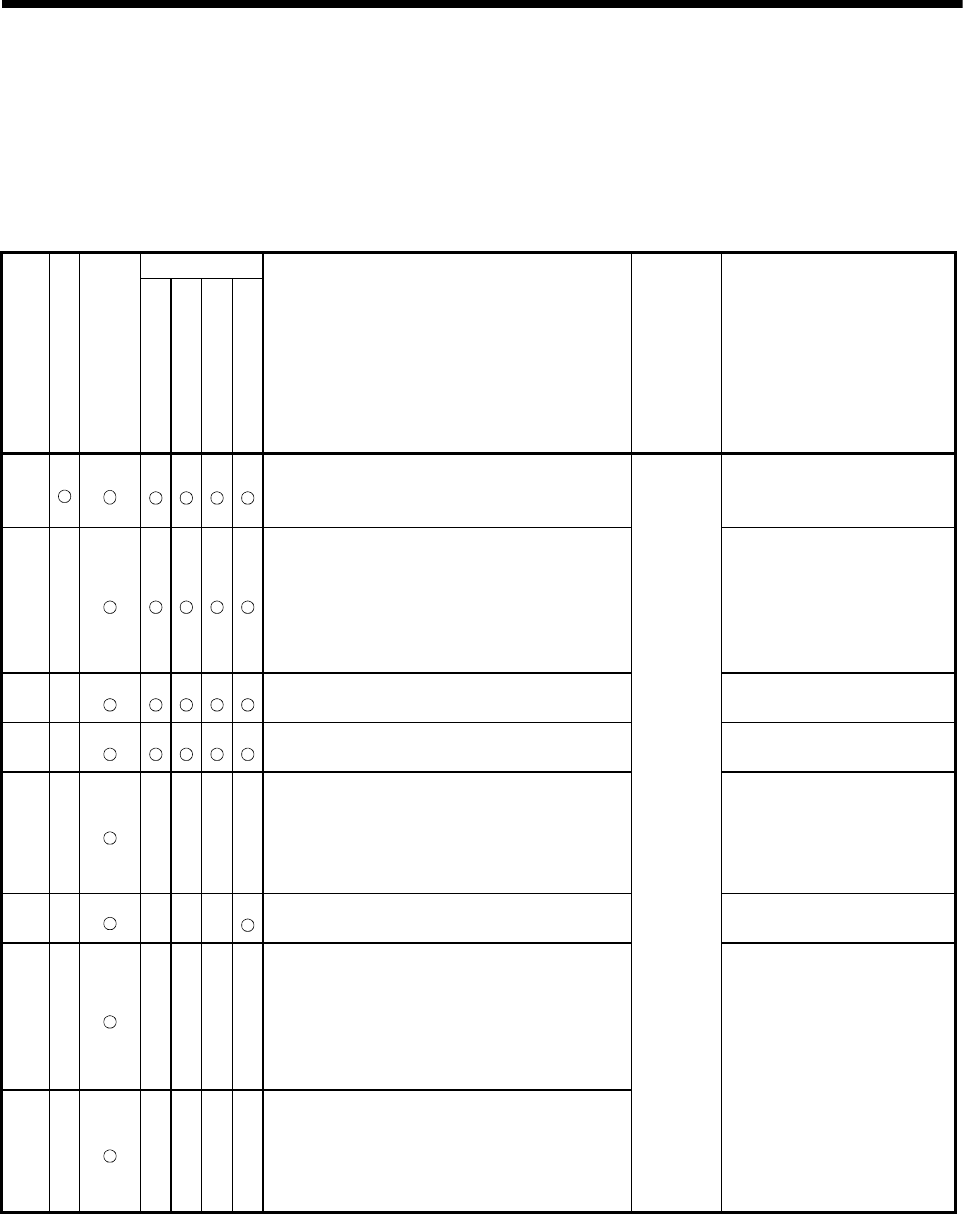
Table 1.4 Positioning control start error (100 to 199) list
Control mode
Error
code
Control program
Axis designation program
(positioning)
JOG
Manual pulse generator
Home position return
OSC
Error cause
Error
processing
Corrective action
100
The PLC ready flag (M2000) or PCPU ready flag
(M9074) is OFF.
• Set the Motion CPU to RUN.
• Turn the PLC ready flag
(M2000) on.
101
The start accept flag (M2001 to M2032) for
applicable axis is ON.
• Take an interlock in the
program not to start the
starting axis. (Use the start
accept flag OFF of the
applicable axis as the starting
condition).
103
The stop command (M3200+20n) for applicable
axis is ON.
• Turn the stop command
(M3200+20n) off and start.
104
The rapid stop command (M3201+20n) for
applicable axis is ON.
• Turn the rapid stop command
(M3201+20n) off and start.
105
(Note)
The feed current value is outside the range of
stroke limit at the start.
• Set within the stroke limit
range by the JOG operation.
• Set within the stroke limit
range by the home position
return or current value change.
106
(Note)
Positioning is outside the range of the stroke limit. • Perform the positioning within
the range of stroke limit.
107
The address that does not generate an arc is set at
the auxiliary point-specified circular interpolation or
auxiliary point-specified helical interpolation.
(Relationship between the start point, auxiliary
point and end point.)
108
(Note)
The address that does not generate an arc is set at
the R (radius) specified circular interpolation or R
(radius) specified helical interpolation.
(Relationship between the start point, radius and
end point.)
Positioning
control
does not
start.
• Correct the addresses of the
Motion program.
(Note): These errors are stored the error codes of the all applicable interpolation axes at the interpolation operation.